


水声通信是当代海洋资源开发和海洋环境立体监测系统中的重要组成部分,随着水下军事及民用数据通信量的日益增加,通过水声信道进行数据传输的要求越来越高。在随机时变多途传播的水下声信道中,如何实现可靠通信是对
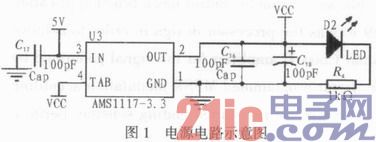
摘要:随着水声通信技术的快速发展,水声遥控系统也已投入使用,它在水下通信、遥测及水下航行器的控制等方面有着广阔的应用前景。该设计基于微功耗单片机MSP430F169作为处理器设计路以便实现不同频率信号
近年来,海洋开发日益影响人们的生活和国家社会的发展。海洋油气开发、海底光缆工程、海底矿产资源探测等等都离不开水下声学定位的支持。目前广泛采用的水下目标定向系统是合作目标定向系统,合作目标定向系统可分为
随着水下武器和水下航行器等水下目标的快速发展,对其进行定位和跟踪从而检验其性能的试验具有非常重要的意义,这也是水下目标试验场的重要工作内容。水下试验场的定位系统根据被测目标是否加装合作声信标,可以分为
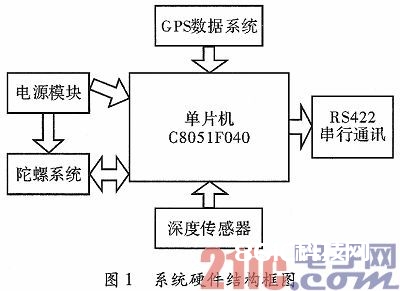
目前,水下平台支架一般与船体固连在一起而水下平台姿态的监测系统放在船上,这样会出现一个问题:监测到的平台姿态数据是否反映平台姿态真实数据。为此设计了基于C8051F040水下平台姿态监测电路,本监测电

摘要:为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。该系统的硬件部分主要是采集下潜深度传感器、姿态传感器、温

集鱼灯是光诱鱿钓作业中最主要的助渔设备,可分为水上灯和水下灯两类。水下集鱼灯具有节能、诱集范围广、穿透水层深等特点。水下集鱼灯不仅可以在晚上将深层的柔鱼诱集到较浅的水层进行作业,还可以在白天将大型柔鱼
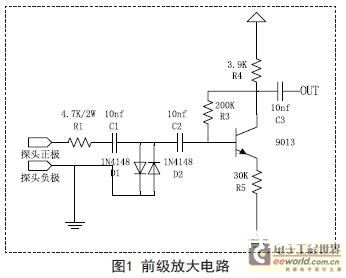
1.引言现代渔业主要利用探鱼器来探测水下鱼类资源的分布,提高捕鱼业的产量。探鱼器利用的就是超声波探测的原理,由超声波探头根据需求发射出相应频率的超声波,超声波在遇到水中不同障碍物后反射回来,被探头接收
本文针对水下机器人(Remote Operated Vehicle)的功能和控制需求,建立了ROV运动学模型,设计了ROV闭环定向控制系统。基于PID控制方法,进行了Simulink数学仿真和模拟闭环

水下航行器操控性能指标中对定向性能有较高要求,而水下航行器的运动具有强的非线性和耦合性,使得不同航速下定向控制和定深转向综合控制成为难点。本文建立了水下航行器的运动学模型,基于滑模理论设计了航向控制器
