


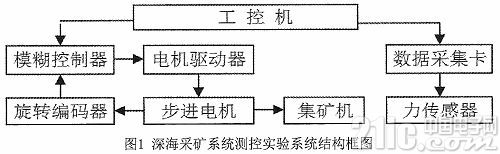
摘要:以中国大洋协会(COMRA)深海采矿测控实验系统中的步进驱动控制系统为例,采用优化的步进电机升降速曲线,建立了等效的仿真模型,重点进行了步进驱动控制系统模糊PID控制器的仿真研究。与经典PID控
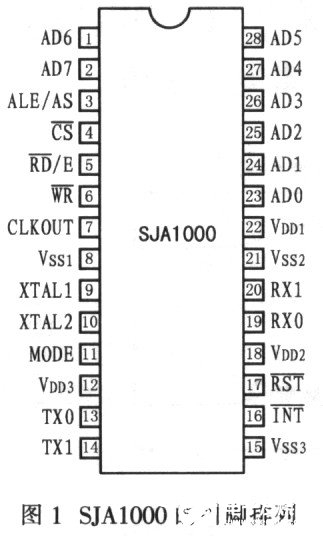
基于C8051F020单片机和SJA1000控制器实现深海测控系统的设计-深海测控系统工作时需要接收来自甲板控制中心的命令,同时要将采集到的数据反送到甲板控制中心,二者之间的最大通信距离大于5km,因此,它们之间的通信要求很高。CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。CAN的直接通信距离最远可达10km(速率在5kb/s以下),报文采用短帧结构,传输时间短,受干扰概率低,保证了数据出错率极低。为此,采用CAN总线作为通信方式。
