摘要:以我国大洋协会(COMRA)深海采矿测控试验体系中的步进驱动操控体系为例,选用优化的步进电机升降速曲线,建立了等效的仿真模型,要点进行了步进驱动操控体系含糊PID操控器的仿真研讨。与经典PID操控器的比照成果表明,含糊PID操控器具有更高的精度和更强的适应性,十分适用于操控体系内部参数非线性且强耦合的场合。
关键词:含糊操控;仿真;步进电机;驱动操控
0 导言
步进电机能将输入的数字脉冲转换为角位移输出,易于用核算机进行操控。步进电机是伺服体系中运用最为广泛的履行元件。在自动操控、移动机器人等工程范畴,有至少三分之二的伺服操控体系是步进驱动体系。但是,依据开环操控的步进驱动体系存在振动和失步,在许多需求准确操控的工程范畴会导致许多问题。因而,研讨开发步进电机的高精度驱动操控体系具有严重的现实意义。关于步进电机这种内部参数非线性且强耦合的体系,一般PID操控的作用不行抱负。而含糊操控本质上便是一种非线性操控,十分适宜步进电机体系的操控驱动。
1 课题来历
多金属结核是一种蕴藏在6000米深海底的极赋经济价值的矿产资源。近十几年来,我国已投入很多人力物力对多金属结核采矿体系和挖掘技能进行了深化的研讨。鉴于深海作业环境的特殊性和杂乱性,深海多金属结核的挖掘面临着诸多困难和危险。因而,我国对多金属结核采矿体系进行了虚拟样机的建模和核算仿真。一起,有必要选用试验手法验证建模仿真成果的合理性和正确性。研发深海采矿体系的测控试验体系正是为了这一意图而打开的。而测控体系中最重要的部分之一便是步进电机的驱动操控体系。高功能的操控战略能使试验体系具有高精度和更好的安稳性,它关于试验数据的正确性和准确性至关重要。
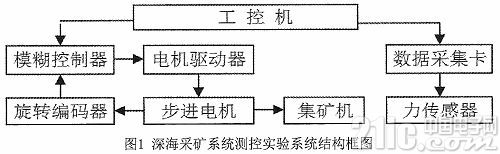
测控试验体系的结构框图如图1所示。
2 步进驱动体系的操控战略与仿真研讨
2.1 步进电机升降速曲线挑选
常见的升降速曲线主要有阶梯升降速、加速度安稳升降速和定常数递减升降速三种。阶梯升降速办法的缺陷是步进电机在速度阶跃时简略失步。加速度安稳升降速办法未充分考虑步进电机输出力矩随速度改变的特性,在高速时也会失步。定常数递减的升降速办法的缺陷是低频时升速太慢,高频时升速太快。以上三种升降速曲线都不行抱负,因而应该在研讨步进电机的运动特性的基础上规划其升降速运转曲线。
由步进电机动态特性可知其惯性扭矩为:
上式中:J体系总转动惯量;ω是电机角速度;β是机械阻尼和电磁阻尼系数;ε是角加速度;TL是摩擦阻力矩和负载力矩;Te是步进电机电磁转矩。
由式(1)可知,步进电机的转矩在驱动脉冲频率较低时比较大,跟着频率的上升近似于线性下降。
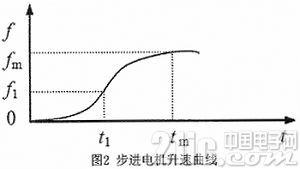
在升速阶段,为了进步体系的快速性,应使角加速度ε尽可能大。在确保步进电机不失步的前提下,转子角加速度ω正比于频率f对时间的微分。步进电机的升速曲线如图2所示。降速曲线为升速益线的对称曲线。这种升降速曲线能充分运用步进电机的有用转矩。快速呼应性好,并且能够防止失步和过冲,简略在微处理器操控的驱动器上完成。
2.2 步进电机的数学模型
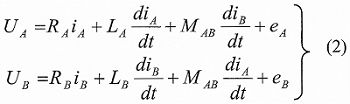
由两相混合式步进电机的电气与电磁回路结构,可得出其线性等值回路如图3。两相混合式步进电机的仿真模型能够归结为两相绕组回路的电压方程和转子的运动方程。转子的运动方程拜见式(1),回路的电压方程如式(2)所示:
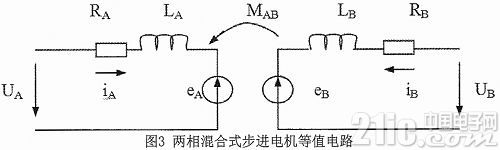
上式中,eA、eB为A、B绕组中的运动电势,UA、UB为端电压;RA、RB为A、B绕组的线圈电阻;iA、iA为绕组电流;LA、LA为绕组自感;MAB为绕组互感,一般来说,两相步进电机相间互感较小,可忽略不计。
依据式2和步进电机的动态特性,电机单相通电时,角位移的传递函数为:
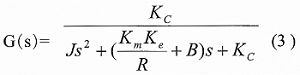
式中,KC、KE、Km别离为常数、电动势系数、转矩系数。
依据试验体系要求选定了步进电机类型,各个常数相应确认。本试验体系选用的是Kinco公司的2S86Q-85B8型步进电机,其参数为:坚持扭矩 8.5N.m,转子惯量3.4Kg.cm2,额定电流6A/Phase,步进角1.8°。将各个参数代入式(3)得到对应的角位移传递函数。
2.3 步进驱动操控体系的含糊操控研讨与仿真剖析
在深海采矿测控试验体系中,步进电机通过传动组织驱动模仿集矿机等部件运动,假如步进电机超调或许旋转速度大幅度动摇,必然影响力学试验数据的准确度和可靠性。由于步进电机具有内部各状态变量高度非线性并彼此耦合的特性,难以用简略的数学模型来进行描绘,假如选用经典的操控理论难以满意体系的操控要求。含糊操控则不依赖于操控方针详细的数学模型,而是通过运用含糊调集理论将专家常识或许娴熟操作人员的经历构成言语规矩直接转化为操控战略,高效率地做出正确的处理和判别。因而,关于步进电机驱动操控体系,含糊操控是一种十分适宜的挑选。
2.3.1 含糊操控单元结构
深海采矿测控试验体系中的步进驱动操控体系速度操控单元结构框图如下所示:
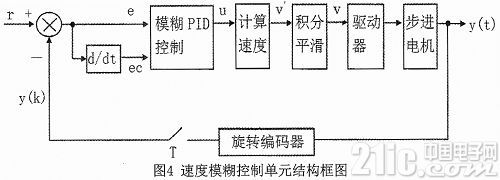
含糊操控体系选用二维操控器,输入为速度差错e和差错改变率△e。PID操控的初始值选用Ziegler-Nichols办法确认。含糊操控单元的输入是预订的方针速度r,旋转编码器测得的步进电机实践转速作为反应输入,然后核算转速差错e和差错改变率ec,通过量化和含糊化后作为含糊操控器的输入信号,运用含糊规矩判定后输出含糊操控量,含糊操控量再通过解含糊后输出步进电机转速的准确增量,与上一个操控周期的转速相加后输出。
含糊操控器选用两输入单输出结构,两路输出操控选用相同的操控规矩表和参数。通过含糊算法后,实践输出速度为v’(k)=v’(k-1)+u(k)。为了有用防止步进电机由于操控量的骤变而失步,体系输出v’需求积分滑润才得到速度v。
2.3.2 含糊操控规矩的挑选
步进电机的含糊操控体系有三个含糊变量:差错e、差错改变率ec和输出u。一般来说,操控言语的改变值越多,描绘就越准确,操控精度也越高,操控作用越好,但过细的区分将会使操控规矩杂乱,核算量添加,完成难度加大。在含糊操控器中,![]() 、
、![]() 和U的含糊子集取相同的言语值,即{NB,NM,NS,ZO,PS,PM,PB},对应的论域[-3,-2,-1, O, 1, 2, 3]。
和U的含糊子集取相同的言语值,即{NB,NM,NS,ZO,PS,PM,PB},对应的论域[-3,-2,-1, O, 1, 2, 3]。
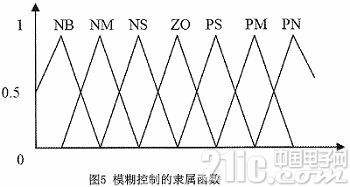
在含糊操控器中,从属函数用于将实践的输入量转变为含糊量。形状越陡的从属函数其分辨率越高,操控灵敏度也越高。而形状越缓的从属函数其操控特性越平稳,体系安稳性越好。在实践体系中,速度的反应量都会含有噪音。因而,从属函数的挑选还应考虑反应量噪音的问题。三角形函数形状比较简略又易于核算,并且同其它杂乱的从属函数得出的成果相差很小,具有很好的功能。在本含糊操控器中,![]() 、
、![]() 和U的从属函数均选用三角形函数,如图5所示。
和U的从属函数均选用三角形函数,如图5所示。
为了使含糊操控器得到较好的操控作用,当速度的差错较大时,含糊规矩应使操控器的输出尽可能减小差错;当速度的差错较小时,含糊规矩尽可能保持体系的安稳性,尽量防止超调。
常用的解含糊办法有最大从属度法、中位数法和加权均匀法等等。运用中位数法的含糊操控器类似于多值继电器,运用加权均匀法的含糊操控器类似于PI操控器。这两种办法都优于最大从属度法。图6为三种含糊推理宽和含糊办法得到的操控成果示意图。
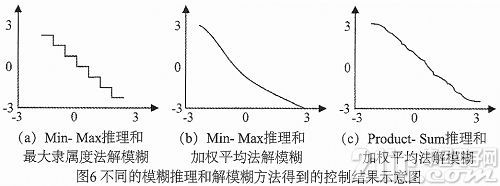
从上图能够看出,图(a)的最大从属度法具有多值继电器的特性,不利于体系安稳;图(b)和图(c)比较挨近。含糊推理办法对含糊操控器功能的影响比解含糊办法小。本含糊操控器选用Min-Max推理和加权均匀法解含糊。
2.3.3 仿真成果
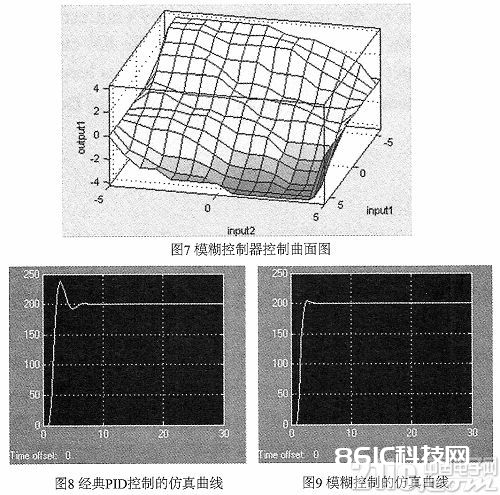
图7为含糊操控器的操控作用曲面图。图8和图9为给定速度200转/分,稳态差错选5%时,别离选用经典PID操控器和含糊PID操控器得到的速度仿真曲线。由图可知,含糊操控的上升时间略有添加,但超调量比经典PID操控小得多,安稳性更好,体系的整体功能大大进步。
3 定论
本文论述了深海采矿测控试验体系的步进驱动体系含糊操控器的仿真剖析研讨进程,由比照仿真成果可知,选用含糊理论操控具有高度非线性特性的步进体系能比较有用地处理振动和失步的问题。与经典PID操控器比较,含糊操控器大大进步了杂乱体系的整体功能,具有杰出的操控作用。含糊PID操控战略在步进驱动体系中具有很好的实用性。