




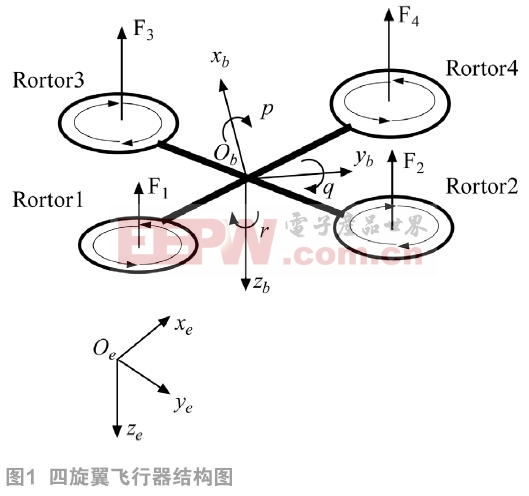
针对在参数变化、外部干扰条件下四旋翼飞行器的稳定飞行控制问题,本文提出了一种基于反步法的四旋翼飞行器增稳控制方法。首先,建立四旋翼飞行器的动态模型。其次,基于反步法设计的控制器用于飞行器姿态控制,采用

汽车行业在其发展历程中已经走过了很长时间的一段路。现在,制造自动驾驶汽车和自动驾驶汽车的技术已经不再只出现在科幻小说里,现实世界也已在逐渐应用。假如把未来世界想象成一个类似太空时代充满飞行器的世界,然
全国各地已经陆续开放低空管制,北京也将在2015年全面开放低空领域,这对低空飞行器将是一个十分重大的好消息!低空飞行器也将迎来一个新的发展春天。实际上,近年四轴飞行器发展相当迅速,国内的航拍水平越
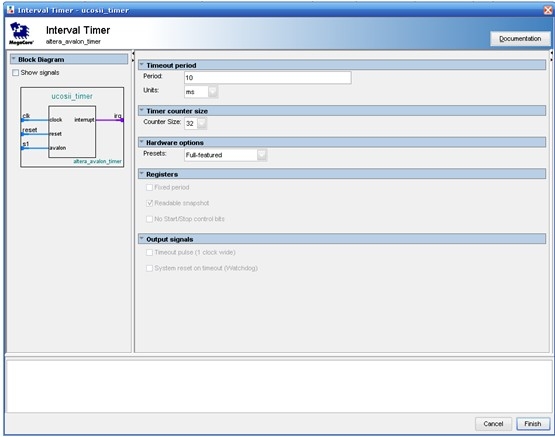
uC/OS-II(又名Micro C/OS)是基于嵌入式系统的完整的,可移植、可固化、可裁剪的可剥夺型实时内核,其已经广泛应用在航空飞行器、医疗设备、工业控制等可靠性和稳定性要求较高的场合。该内核
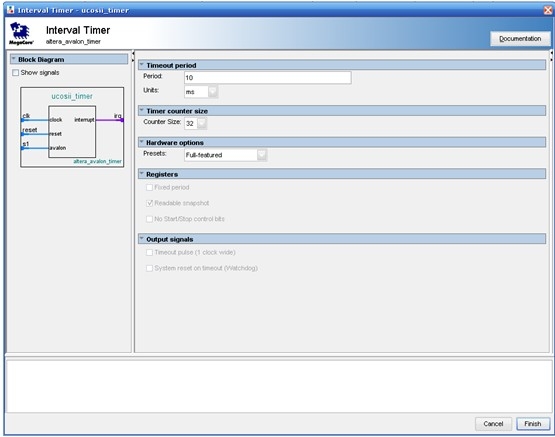
uC/OS-II(又名Micro C/OS)是基于嵌入式系统的完整的,可移植、可固化、可裁剪的可剥夺型实时内核,其已经广泛应用在航空飞行器、医疗设备、工业控制等可靠性和稳定性要求较高的场合。该内核
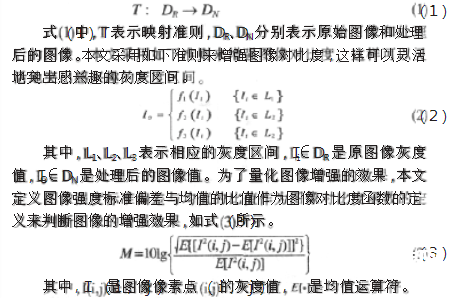
采用SOPC技术和VHDL语言实现图像增强处理系统的应用方案-图像增强最早起源于人类的空间探索计划。从卫星或飞船上获得的关于地球和太阳系中行星的图像因为多种原因而降质,这些原因如成像设备受使用环境的限制,相机和对象的相对运动,相机机械振动,飞行器的跳动和翻转等等,获取图像的代价十分昂贵,图像的降质造成科学意义上的损失也是巨大的。因此由降质图像获得清晰图像的努力是非常有意义的。图像增强技术是通过采取适当的增强处理使原来模糊不清甚至根本无法分辨的原始图片处理成清楚、明晰的富含大量有用信息的可用图像。因此,增强处理技术在医学、遥感、微生物、以及军事等领域得到了广泛应用。
