



四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现

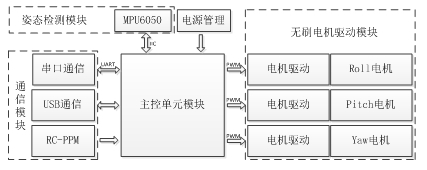
四轴飞行器具有不稳定,非线性特性,姿态控制为四轴飞行器控制系统的核心。机械部分搭建四个具有对称结构的螺旋桨叶和驱动电机。电气部分则采用STM32为控制核心的惯性参考模块作为姿态控制板,通过四轴飞行器的



从操作系统层面解读可穿戴设备-智能设备包括很多类,有大有小,例如机器人、无人飞行器、IoT物联网设备、智能家居设备、可穿戴设备等等。这些智能设备上的计算中枢和服务器、桌面、平板、手机有着很多不同,各自
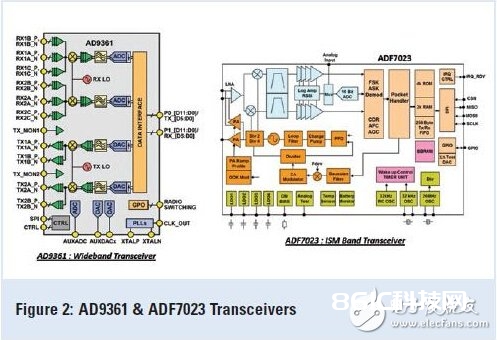
飞行器如何射频链接?看完就知道-本文着眼于一些选择,我们有设计控制和数据链无人机时。它探讨了发展和成熟的R / C单位,开辟了道路,并在需要的安全性,抗干扰能力强的增加和自治一定程度时出现错误。
王康南1 王利霞21.郑州外国语学校(河南郑州 450001) 2.郑州轻工业学院(河南 郑州 450002)近些年来,无人飞行器在航空摄影、高空遥感以及高空地形勘探等领域得到了广泛发展,
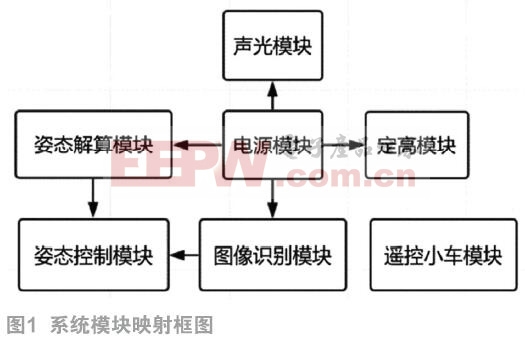
随着四旋翼飞行器技术的不断应用,无人机的各种用途被不断发掘出来。基于四旋翼飞行器相对平稳的飞行状态和可控等特点,利用四旋翼飞行器进行探测和跟踪目标成为可能。本文介绍了一种四旋翼自主飞行探测跟踪系统,该

介绍了一种基于四旋翼飞行器快速、稳定探测和跟综地面上有色信标的系统。该系统由三部分组成:具有探测和跟踪功能的四旋翼飞行器、可遥控移动的有色信标小车和遥控终端(地面站)。四旋翼飞行器、可遥控移动的有色信
