


微机电传感器(MEMS)惯性传感器在近几年来高速开展并得到了广泛的运用。微惯性传感器作为一种重要的MEMS,由微型陀螺仪、微型加速度计、专用集成电路(ASIC)、嵌入式微处理器及相应的软件组成,输出能够包括角速度、加速度、姿势等多种信息,而且其体积小、集成度高、运用方便,在军民等范畴都得到广泛运用。
CRSl0是Silicon SENSING公司的一款高精度的MEMS单轴陀螺仪,它是数字式输出,输出传感器运动进程的角速度和传感器作业的环境温度。
在转角丈量方面,传统的办法是运用视点传感器,丈量开始时刻的视点值,然后相比较得到转过的视点。在此,依据运动学原理,运用CRSl0陀螺仪,规划了一个角速度和转角丈量体系,体系装备有数据输出接口和液晶显现界面。
1 CRS10功用介绍及运用
CRSl0是一款高精度的数字角速率陀螺仪,集成度高,较宽的作业温度(-40~80℃),高带宽和广泛的频率规模,极低的角速率随机漂移,规范5 V电压供电,SPI数据输出和模仿端口输出2种输出方法满意各种运用不同需求。在CRSl0的默许装备是为75 Hz带宽,±375(°)/s角速率丈量拜访。用户可依据需求,设置其角速率丈量规模和带宽。例如可设置±75(°)/s的丈量规模,也可设置带宽5、10、25、40、50、60和100 Hz。
CRSl0选用23 mmxl7 mmxl0 mm封装。无论是笔直或可用水平支架可外表设备在PCB上。其体积小,集成度高,易于设备。可广泛运用于轿车偏航率测定、制导和操控、渠道安稳、图画安稳、惯性丈量设备、机器人和导航等范畴。
1.1 CRSl0功用介绍
图1(a)和图l(b)分别是CRSl0的实物图和功用框图。由图l(b)可知,在CRSl0中,MEMS陀螺仪先感知外界信号,并将信号输出给数据收集专用集成电路,数据收集电路将处理后的信号输出给微操控器。微操控器将得到的数据成果存入输出寄存器。通过SPI总线,外部SPI主控器
件向CRSl0发送操控指令或许读取。CRSl0内部设置有操控寄存器,寄存器都有默许的值,通过对操控寄存器的修改写操作,能够改动角速率丈量规模频率和输出带宽等方面的操控作用。
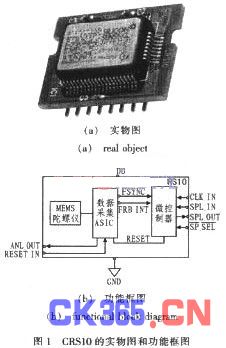
CRSl0丈量的是平行于PCB平面的角速率。CLK_N,SPI_IN,SPI_OUT和引脚是传感器的SPI接口,引脚是传感器的复位引脚。A-NL_OUT是角速率的模仿输出端口。
CRSl0的数字输出部分还包括其作业环境的温度值。假如在无偿条件下,陀螺仪功能欠安,那么可通过运用这个温度进行建模和补偿。
1.2 CRS10运用办法
1.2.1 CRS1O硬件建接
CRSl0的SPI接口与各种微处理器SPI主操控器材接线如图2所示。SPI总线的时钟频率最高可到达2.5 MHz,主张选用1 MHz。

1.2.2 CRSl0数据读写与数据处理
通过SPI总线,能够对CRSl0进行读写操作。能够依据规划要求设置操控寄存器的值到达操控作用,也能够运用寄存器的默许设置。操控指令由1个字节状况位,4个字节的数据位和1个字节的校验位共6个字节组成。向CRSl0写操控指令时,只需将指令串通过SPI总线发送给CRSl0即可。
读取CRSl0输出的数据时,从总线上读取到的是6个字节的数据,依次是:1个字节的状况位,2个字节的角速率数据位,2个字节的温度数据位和1个字节的校验位。
角速率值(RATE_OUT)和温度值(TEMP_OUT)输出的数据格式均为16位二进制的补码,能够运用式(1)进行解算:
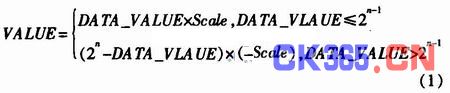
式中,DATA_VALUE为寄存器的输出数据,VALUE为转化后实践的丈量量的值,Scale为寄存器值最小值代表的最小单位,n为对应寄存器的数据位数。
在这儿有一个小技巧,因为数据是16位二进制补码类型,能够运用数据类型为整型(int)存储数据,这样亦能够省掉其间的数据处理进程。
2 角速率和转角丈量体系规划
这儿给出了依据LMS8962与CRSl0的倾角丈量体系的原理与规划。
2.1 转角丈量原理
CRSl0是丈量其地点PCB平面的角速率。依据运动学原理,视点等于角速率在时刻上的积分,因而,能够得到转角与角速率的联系:

式中,θ是当时视点,θo是运动初始时的初始转角,ω为角速率,to为初始时刻,t为当时时刻。
在数字体系中,选用其离散型方程:

式中,θ、θo、ω的意义与式(2)相同,△t表明采样数据的时刻距离。
依据上述原理,运用CRSl0规划丈量转角体系。只需确保采样频率够快,转角渠道安稳,噪声较小即可。
2.2 硬件电路规划
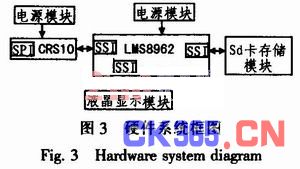
运用LMS8962与CRSl0搭建成倾角丈量体系,LMS8962是一款高功能的32位Cortex-M3内核微处理器。它有丰厚的片内外设,如模数转化(ADC),PWM,CAN和串行总线(SSI)等,功用强大,易于集成。
LMS8962与CRSl0组成的角速率和转角丈量体系硬件规划框图如图3所示。LMS8962通过SSI总线与CRSIO进行通讯。将收集到的数据存储到SD卡中,将解算得到的成果实时在液晶显现模块上显现。SD卡的数据存储为将来的数据剖析供给一个很好的数据收集渠道。SSI是串行通讯总线,它兼容SPI总线。
2.3 软件规划
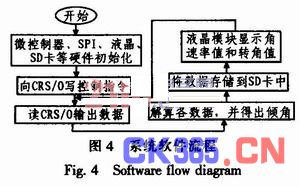
图4是体系的软件规划流程。程序发动进入体系初始化,接下来向CRSl0写操控指令,以设置CRSl0作业在需求的形式下,然后读取回来的数据并进行解算,最终通过存储数据到SD卡中并在液晶模块中显现。
3 实验成果
为了验证体系丈量角速率和转角的作用,选用姿势与航向参阅体系(attitude and heading reference system)AHRS500GA-226传感器作为参阅进行测验。AHRS500GA-226是Crossbow Technology公司的一款高精度的IMU。将两体系固定设备在同一渠道上,使CRSl0丈量的角速率平面与AHRS的YAW平面(航向角速率和航向角丈量平面)相共同。比较两个体系输出的角速率和视点数据,得到如图5所示的成果。
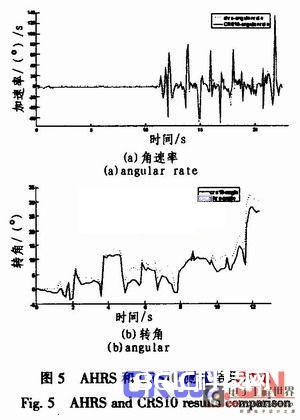
由图中5可看出,CRSl0所丈量的角速率与AHRS丈量得到的角速率运动的趋势共同,AHRS的成果比较滑润。CRSl0有噪声,部分峻峭。在停止和小角速率运动时两者丈量成果根本重合,差错在0.1(°)/s左右。在大视点运动和急速滚动时,两者的重合作用欠安,差错较大,有到达7(°)/s。这是因为AHRS得到的数据是通过滤波和数据交融处理的。视点丈量的趋势共同,在部分重合的比较好。但视点丈量的差错比较大。原因在于本文运用的视点计算办法:1)运用的是原始的角速率数据,角速率没有通过滤波处理,噪声较大,积分叠加到视点上得到的误差亦较大;2)运用的是简略的积分求视点,没有补偿,没有滑润。综上可知,角速率丈量作用比较好,视点丈量可行,但算法有待进步。
4 定论
依据LMS8962 ARM微处理器与CRSl0陀螺仪的角速率与转角丈量体系角速率丈量差错平均为0.550(°)/s,最大到达7(°)/s,在小角速率丈量时作用比较好。转角丈量差错平均差错为2.5°,丈量精度有待进一步进步。形成视点丈量差错的原因首要是没有对得到的角速率进行滤波和数据的交融。滤波算法和交融算法的运用和完善是该体系往后要完善的首要作业。从丈量的成果来看,只需做好滤波和交融的处理,进步体系的精确性是可行的。






