摘要:跟着我国”节能减排”的势在必行,船只靠港期间运用码头岸电以及岸电供应的智能监控现已成为当时的趋势,并正在大力推广。 CAN总线在智能监控范畴具有宽广的运用远景,在大型网络监控体系中,监控体系的实时性具有重要的含义。文章剖析了CAN总线的实时性问题,针对CAN协 议提出了仿真模型,试验测出延时数据,总结比较了当时几种依据TTCAN的算法优化问题。关于开发大型网络监控体系具有必定的实践参阅含义。
码头岸电的运用关于环境的维护具有严重含义,岸电的遍及不仅能很多削减船只靠港时自身发电所发生的废气,一起也大大的下降了港口的噪声污染。为了遍及这一具有重要重要含义的技能,各国都在大力发展船只靠港岸电供电技能;相应的就需求一个智能的监控网络完结供电的智能化。当时工业级监控范畴广泛选用现场总线来作为数据传输的中介。而其间CAN总线以其特有的长处现已广泛运用在各级智能操控范畴。
操控器局域网(Controller Area Network)现已广泛运用于机械、纺织、医疗、机器人等范畴。CAN现已构成国际规范,并被公认为是几种最为有出路的现场总线之一。CAN总线作为传输信息的中介,其传输实时性一直是CAN体系重要的目标之一,针对其的研讨也是当时有关CAN总线的热门研讨问题之一。
1 操控器局域网(CAN)实时性问题研讨
CAN总线和其他的操控总线比较,具有杰出的可靠性、灵活性和实时性。体现在一下几个方面:
1)CAN总线选用多主通讯办法,网络上恣意一节点均可在总线闲暇时刻主动的向其他节点发送信息,而不分主从。
2)CAN总线选用对各节点区分优先级的办法,可协调体系各节点的传送时序。
3)CAN总线选用非损坏性总线裁定技能,当一起有多个节点向总线发送信息时,优先级较低的节点主动退出发送,而最高优先级的节点不受影响的持续传送数据。
因为篇幅有限,CAN总线的其他特色不在赘述。正是CAN总线具有上述1、2、3的特色。极点情况下,或许呈现等级较低的节点需求很长的时刻才干发送数据甚至无限期时延。这就要求对CAN总线的通讯实时性具体剖析,以抵达体系规划的要求。
1.1 CAN总线延时剖析
CAN总线的网络延时包含:从待发送数据在总线节点A改变开端,直到该数据在别的一个节点B中得到承认,这期间的总延时时刻。依据CAN总线的数据流的传达方向可知,CAN的报文信息延时由帧延时、软件延时与CAN操控器延时和媒体拜访延时等部分组成。
1.2 帧延时剖析
帧延时既报文信息的传输延时,由报文的帧长度和总线的传输速率决议。依据CAN2.0B协议,CAN总线的报文信息共有以下4种帧类型:数据帧、长途帧、过错帧和过载帧。
CAN总线为完结总线闲暇的确认、CAN操控器的同步和传输过错的检测,选用位流编码技能,即在帧的帧开端、裁定场、操控场、数据场以及CRC序列。均经过位填充的办法编码。不管何时,发送器只需检测到位流里有5个接连相同值的位,便主动在位流里刺进1位相反极性位;一起报文的位流依据“不归零”(Not Return To Zero,NRZ)的办法来编码,在整个位时刻里,位的电平要么为“显性”,要么为“阴性”。位填充机制形成总线上实践传输音讯的位数一直大于原始的位数。
CAN总线的传输速率也是影响帧延时的重要要素。因为信息在CAN总线上是串行发送的,因而传输速率由波特率衡量。将CAN总线运用于实践工业现场中时,其传输速率跟着传输间隔(40 m~10 km)而相应的在1 M~5 kbit/s之间改变。
归纳上述帧长度、波特率和传输间隔对帧延时的影响,针对扩展帧,得到其在最大传输速率条件下对应不同数据字节的延时,如表1所示。
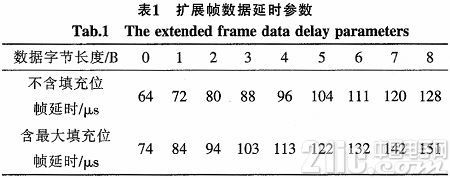
因为CAN总线的报文信息大都选用短帧结构,其传输的数据字节较少,标识符的差异对信息延时有着较大的影响,均匀能抵达30%~40%左右。
1.3 软件及操控器延时剖析
软件及操控器导致的延时首要与体系运用的MCU、CAN操控器及接口芯片有关。本文在码头岸电监控体系的实践运用中选用的是 C8051F040作为MCU(内嵌CAN操控器),CAN收发器是PCA82C250。为了丈量便利,选用的是一对CAN的ISA操控通讯卡,一个 CAN节点作为发送节点,另一个作为接纳节点,排除了总线媒体拜访的裁定抵触延时。
总延时包含从发送进程往CAN操控器的发送缓存器中写第一个数据开端,一直到接纳进程中将接纳缓存器中的有关数据悉数读出的整个阶段。时刻的丈量可经过主操控器操控面板上的计数芯片的计数通道来获取,精度为1μs,丈量取得的数据如表2所示。

从表2剖析可知,在固定发送速率条件下,跟着发送字节的递加,非帧延时时刻也成正比联系递加,这首要归因于CAN操控器和MCU之间的数据交换量的添加。一起,依据实践丈量,CAN总线在通讯速率较低时,传输延时较高,通讯速率对延时影响较大;一旦通讯速率抵达50 kbit/s之上,发送信息的字节数将成为延时的首要要素,而且CAN网络的软件延时及操控器延时跟着信息字节数的递加首要在30~100 μs之间改变。
1.4 依据排队论的媒体拜访延时剖析
在中大型操控网络中,跟着体系中操控节点的添加,操控网络中的信息流也将急剧添加。在这样的多节点、高负荷的网络操控体系中,由报文抢占总线资源而引起的媒体拜访延时将越来越凸显出其重要性,关于媒体拜访延时的剖析将是规划操控体系时的重要参阅要素。
排队论首要研讨统计平衡下的各项功能目标的概率性质,依据CAN总线协议,能够把CAN总线的网络传输模型可模仿为图1所示。
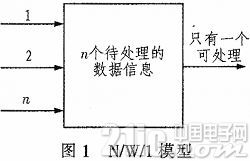
这样就能树立一个模仿的排队模型,n个待处理的信息相当于顾客,而处理信息节点相当于服务。待处理信息的抵达遵守泊松散布,呈现出规律性的特色;CAN总线选用位填充的办法进行报文传送,报文的长度纷歧而使服务时刻呈现出必定的概率散布,服务时刻遵守一般概率散布W;一起只要一个信息可在总线上传输。树立一个依据排队论的非侵占优先级的N/W/1模型,如图1所示。
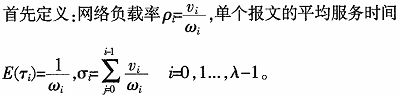
假定体系容量无限;在体系正常接连运行时,CAN总线体系中的音讯通常是持续不断发送的,则能够假定顾客来历无限(抱负状况剖析,差错较小)。设CAN总线的报文优先级分别为从0到λ-1,共λ个等级,这儿数字越小,代表的优先级越高;各个等级的报文均以泊松形式进入体系,其均匀抵达速度分别为 v0v1…vλ-1,体系对各个报文的均匀服务速率分别为ω0ω1ωλ-1,服务时刻遵守指数散布,具有马尔科夫特性。
音讯i的音讯等候时刻Ti包含:
1)当时正在总线上传输的的信息的传送结束时刻To;
2)在等候期间,比i优先级较高的信息j在上一音讯息发送结束后占用总线发送信息的时刻Tj,由此可得Ti=Tj+T0,求Ti的数学希望即音讯i的均匀等候时刻
Tξi=E(Ti)=E(T0+Tj) (1)
依据排队论的剖析办法,可得到第i级报文的等候时刻为
Little定理指出:体系中物体的均匀数量等于物体脱离体系的均匀速率和每个物体在体系中逗留的均匀时刻(这儿指单个报文的均匀服务时刻)的乘积。依据little定理可得出第i级报文的均匀等候时刻为:
在试验中模仿码头岸电监控体系中的8个下位机智能监控点,设定优先级分别为0到7之间;在体系建立完结之后,因为体系的晶振频率现已确认,则各个优先级的报文到真试验达速率必定,相应服务速率必定,仿得到的网络功能参数如表3所示。
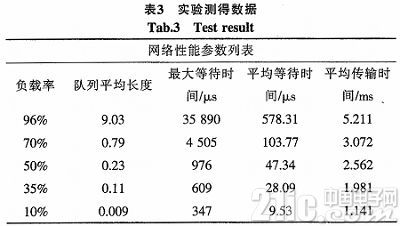
从上表可看出,网络负载率对报文音讯的等候延时有着很大的影响;当网络负载率较小时,音讯基本能确保实时发送,可是当负载率极高时,CAN总线的网络延时仍是比较严重的。一起优先级对等候时刻的影响也是巨大的,当网络负载较高且各优先级的报文散布比较均匀的时分,优先级小于λ-1/2的报文基本能及时的发送,但跟着优先级的持续添加,网络延时剧增,将无法满意操控网络的实时性要求。
2 实时功能进步剖析
经过以上对CAN网络的实时功能的剖析,在规划实践的操控网络中,给予读者一下参阅:
1)当规范帧能满意体系对操控容量、传输可靠性等的要求时,尽量避免运用扩展帧。2)在满意操控体系的稳定性的要求前提下,尽量进步体系的传输速率。3)削减操控网络中不必要的节点及报文信息,以抵达下降负载率的意图。
针对CAN网络自身的优化研讨也很必要,关于CAN网络的优化问题,在协议层上面上现在相对老练的办法是选用依据时刻触发的TTCAN协议,此协议彻底兼容于CAN节点,不管是数据链路层仍是物理层。TTCAN节点不需求专用的总线防护设备,节点之间总线抵触的避免依托CAN的无损坏位裁定机制和CAN毛病约束。
文献针对TTCAN提出了依据字母编码的遗传算法,此算法提出了一种选用“权”的动态优先级进步算法,而且引入了字母编码办法对遗传算法进行优化。有用缩短了体系矩
阵中的事情型信息的滞后时刻,一起削减了周期性信息的颤动性问题且核算速度快,具有较好的优化作用。
文献针对,TTCAN提出了粒子群优化算法(PSO),PSO算法比遗传算法具有更快的收敛速度、概念简略、易于完结;在处理低维问题时分具有必定的优越性。在固定优先级算法的基础上,选用依据粒子群算法的TTCAN体系调度算法,在削减信息的传输颤动和进步带宽利用率上比传统算法具有必定的优势性。在大型的归纳CAN体系中,依据粒子群算法优化的TTCAN矩阵在实时性和进步带宽利用率方面都有很大的研讨价值。
3 定论
针关于中小型港口,其靠港船只相对较少,智能供电终端无需装置太多就能满意靠港船只的供电需求,因而依托CAN总线自身的协议就能具有较好的网络实时性。可是对归纳的大型港口而言,其智能供电终端一般都有数十甚至上百个,这就存在传输实时功能否满意要求的问题。针对这一问题的研讨仍是有必定价值的。
在码头岸电监控体系中,因为本课题只是选用CAN模块模仿8个岸电供电监控点,因而关于CAN的实时性研讨还不行深化,有待进一步的什么学习。但CAN总线作为当时最为广泛运用的现场总线之一,对其实时性的深化剖析研讨关于体系的优化和信息的实时传送都具有严重的含义,往后将针对算法优化的问题打开进一步的剖析研讨。