1 布景常识
如图1所示,交通摄像头对公路上移动的轿车进行实时的定位,跟着小轿车的移动,赤色框也跟从小轿车移动,实时将小轿车框起来。
根据实时物体移动的静态图画布景中移动方针检测是核算机视觉范畴的研讨热门,在安防、监控、智能交通、机器才智、以及军事范畴等社会生活和军事防护等许多范畴都有较大的实用价值。移动方针检测的本质是从实时图画序列中将图画的改变区域从全体图画中切割提取出来。因为图画的后期处理,比方移动方针的分类、盯梢、测距、判别巨细以及行为动作剖析等,首要考虑的是移动方针区域的像素信息,所以对移动方针的精确检测和有用切割是整个检测盯梢体系的重要根底。
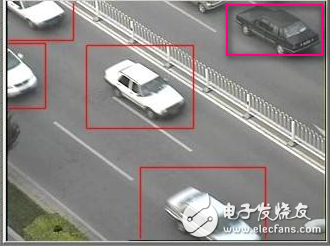
图1 公路上的运动轿车
现在逐步构成三种运动方针的检测算法:
1)帧间差分法 是选用视频序列中的相邻两帧图画做差的办法,来检测视频序列中的移动方针。可是受运动方针和布景改变的影响,检测进程中有或许呈现伪方针或许方针中呈现“空泛”,在方针运动不是太快时能够有用的检测到方针。
2)布景减除法首要在没有方针的场景中获取布景图画,然后运用实时视频序列和布景图画做差,来完成地移动方针的检测。怎么取得布景是布景减除法的要害。
3)光流法是通过给图画中每个像素点赋予一个速度矢量的办法树立光流场,运用光流场中矢量运动的连续性来检测移动方针。该办法的核算量一般很大,难以完成实时性的检测。
2 FPGA完成
本节试验将完成对镜头内移动物体(不管变大变小左右移动)的实时鸿沟进行盯梢,为后期根据FPGA的人脸方位辨认,字符辨认(字符在镜头内恣意方位)等打下根底。本节颗也是走向人工智能,机器辨认的重要一课。
算法完成:关于五颜六色图画直接运用FPGA进行鸿沟查找难度比较大,所以咱们一般对图画传感器收集来的图画进行预处理。如图2所示,首要进行灰度化来削减图画数据量,然后运用帧差法对两幅不同时间的图画进行差值(此步暂未进行)。然后咱们对得到的图画二值化。终究对二值图画进行鸿沟查找将成果显现到lcd显现屏上。
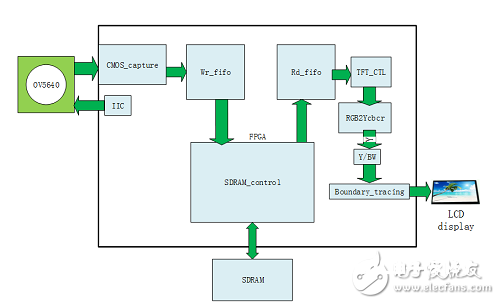
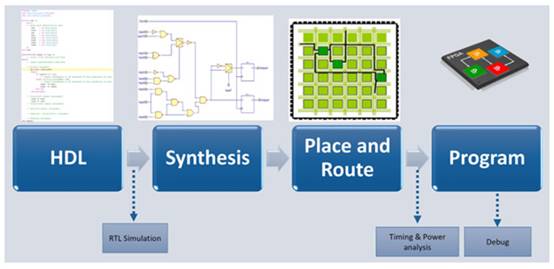
图2 根据FPGA的移动方针追寻体系
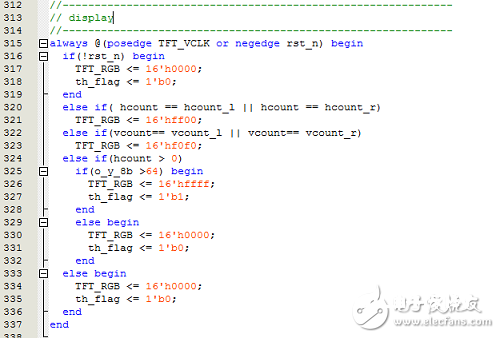
FPGA部分源码:
成果展现:
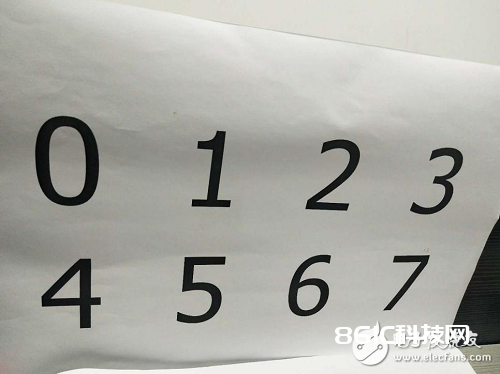
图3 试验图1
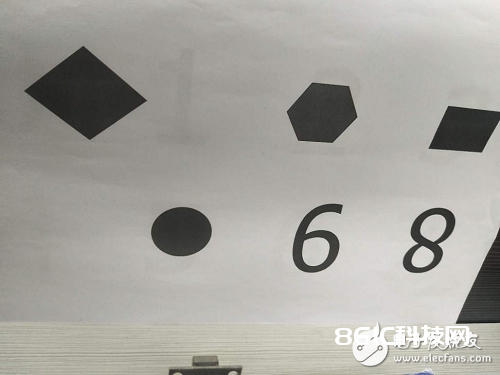
图4 试验图2

图5 对6的鸿沟追寻

图6 对圆的鸿沟盯梢
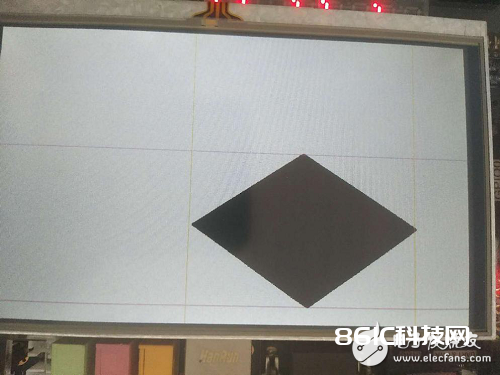
图7 对菱形的鸿沟追寻
成果剖析:
如图5,6,7所示咱们完成了对数字6、图形圆、以及菱形的最大鸿沟的实时定位,不管图画形状巨细,均精确定位到了图画的上下左右鸿沟。对方针成功进行了实时的定位。这将为咱们后期的各种精确辨认打下坚实的根底。