0 引 言
跟着现代科学技能的飞速开展和社会的前进,服务机器人与人们的日子联络越来越严密,故日益遭到重视。电机操控器作为机器人的中心部分,直接决议了其功用和功用。尽管用于工业机器人的伺服电机操控器技能现已老练,但用于服务机器人的伺服电机操控器的研讨和开发仍然存在许多问题。开发一种“具有开放式结构的模块化、规范化、小型化的嵌入式电机操控器”现已成为当时服务机器人操控器的一个开展方向。
依据美国Microchip公司出产的PIC单片机具有速度快、体积小、低功耗、驱动才干大、可靠性高级长处,故选用该系列微型芯片:PIC18F452开发了一种小型嵌入式电机操控器。该操控器和主控微机、驱动器一同构成机器人伺服操控体系。伺服操控体系采纳了可变的操控方法,而且操控器能和驱动电机一同安装在机器人的各个关节,因而特别合适电池驱动的多轴服务机器人的使用。
本文侧重介绍操控器的软件结构、操作指令和通讯方法。规划了一种使用方便的指令方法,该方法能辨认几十种指令句子,并简单完成对指令句子的扩展。一起用串口方法构成机器人伺服操控体系的神经网络,各个小型操控器不但能和主控微机之间通讯,而且各个操控器之间也可以进行信息沟通。为了保证通讯的接连性和可靠性,该伺服操控体系具有通讯过错处理机制。
1 操控器的软件结构
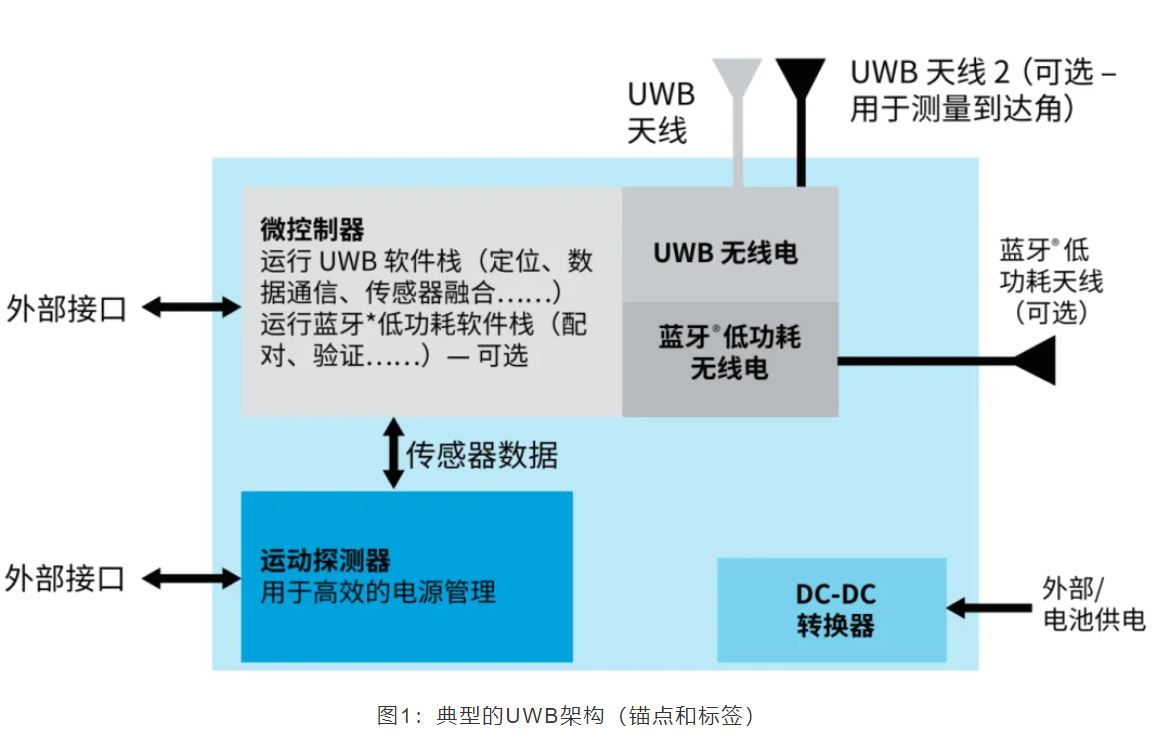
该操控体系最大的特色在于方位、速度、电流三种操控方法可随时改变。为了取得可调的直流电压,使用电力电子器件的彻底可控性,选用PWM脉宽调制技能,直接将稳定的直流电压调制成可变巨细和极性的直流电压作为电机的电枢端电压,完成体系的滑润调速。在每一个操控周期,三种操控方法独立核算,操控器将核算成果以PWM信号方法输出到电机驱动器,一起电机的方位、速度和电流能实时丈量并送到主控微机,然后机器人的各个关节能依据不同的外部环境采纳不同的操控方法。该操控器的操控原理如图1所示。

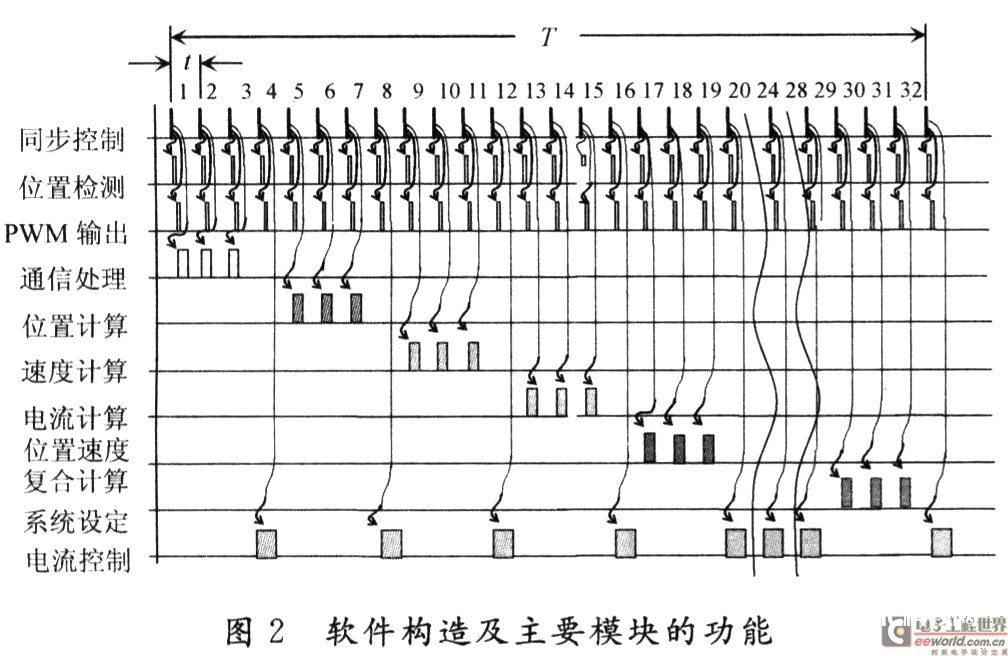
为了完成上述方针,在操控器软件的开发上,选用了模块化和子程序嵌套的规划思维。操控器的核算周期T为400μs,每一个周期划分红32个处理模块,使用中止处理在每一个处理模块(t=12.5μs)中对电机方位译码的脉冲进行计数丈量。操控器软件结构及首要模块的功用如图2所示。
2 操作指令
该操控器的操作指令包含操控指令、设定指令、问询指令等。指令格局的最高字节为指令字节,即操控器的ID号和Code(指令号)。ID指出操控器的辨认号码,Code指出指令代码,它们各占4位。
需求留意的是,关于操控和设定指令,紧随指令字节的是n个字节组成的操控或设定指令数据,但问询指令仅有指令字节,没有指令数据。
2.1 操控指令
伺服操控体系的三种操控方法均有相应的操控指令。
方位操控使用于进行接连点操控的插补点方位操控。方位操控数据由三个字节的有符号数来标明,其最大值和最小值别离为223-1(=7FFFFFH)和-223+1(=800000H)。其间,0H~7FFFFF为电机的正方向,800000H~FFFFFFH为电机的负方向。方位操控指令的格局如图3所示。

速度操控使用于机器人关节以必定速度运动的场合。速度操控数据由一个字节的有符号数来标明,其最大值和最小值别离为27-1(=7F)和-27+1(=80)。
其间,0H~7F为电机的正方向,80H~FFH为电机的负方向。在速度操控方法下,需求中止指令、方针值为零的速度或电流操控指令或抵达极限方位时,体系才干中止运转。
电流操控(转矩操控)不只可以使用于电机的滚动方向和电流的操控方向相同的场合,还可以使用在外力作用下,电机处于中止状况或电机的滚动方向和电流的操控方向相反的场合。电流操控指令的格局和数据字节的最大最小值与速度操控指令相同。在电流操控方法下,中止方法也和速度操控方法相同。
方位速度复合操控使用于一般方位操控,包含发动阶段的加快操控、速度操控、抵达方针前的减速操控和方位操控四个部分。方位速度复合操控指令的操控数据包含3个字节的方针方位数据,1个字节的方针速度数据,1个字节的最大电流数据,共5个字节。各数据的最大最小值别离对应同上。
2.2 设定指令
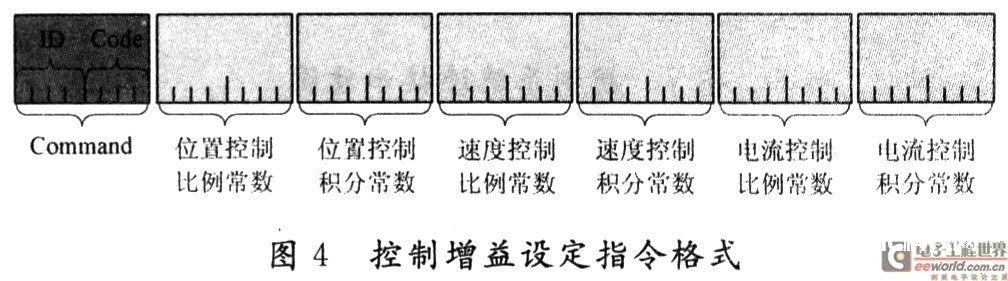
操控增益设定指令用于设定方位、速度和电流操控的份额和积分常数。其指令格局如图4所示。
运动规模设定指令用于设定机器人关节的极限方位,其指令格局如图5所示。其间动作端A和动作端B别离标明正方向的最大和最小方位。

体系设定首要用于依据操控体系的需求设定各种体系数据。设定数据由一个字节的无符号数来标明。
2.3 问询指令
问询指令的首要功用是查询各电机的方位、速度和电流数据,而且发信侧只要接纳到受信侧回来的数据后才干发送下一个问询指令,即问询指令经过一问一答的方法进行通讯。问询指令仅由指令字节组成。
方位问询指令的返信数据格局同图3。
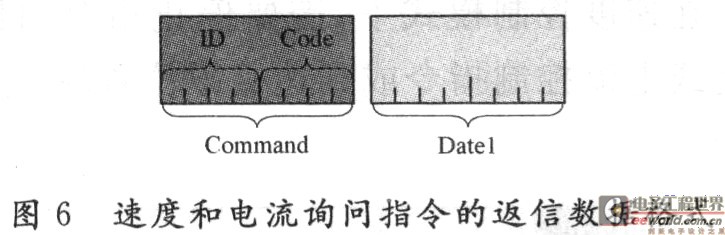
速度和电流问询指令的返信数据均只要一个指令字节和一个数据字节。其返信数据的格局如图6所示。
3 通 信
3.1 操控体系衔接方法
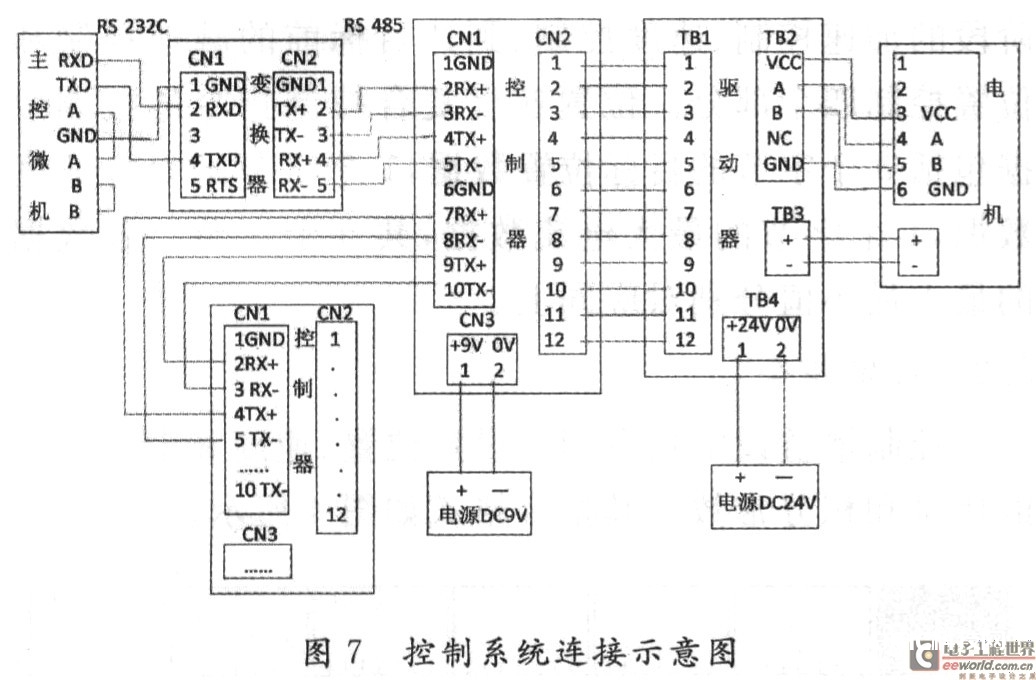
因为该操控器的通讯接口为RS 485,PC机一般只要常用的RS 232串行通讯口,主控微机经过转化器将规范的RS 232C转化为RS 485后与操控器衔接。一个串口可接16个操控器。操控器包含串联通讯接口,电机方位传感器脉冲接纳接口,电机电流检测A/D转化接口,PWM操控输出接口和其他I/O接口。主控微机、操控器、驱动器和电机的衔接如图7所示。
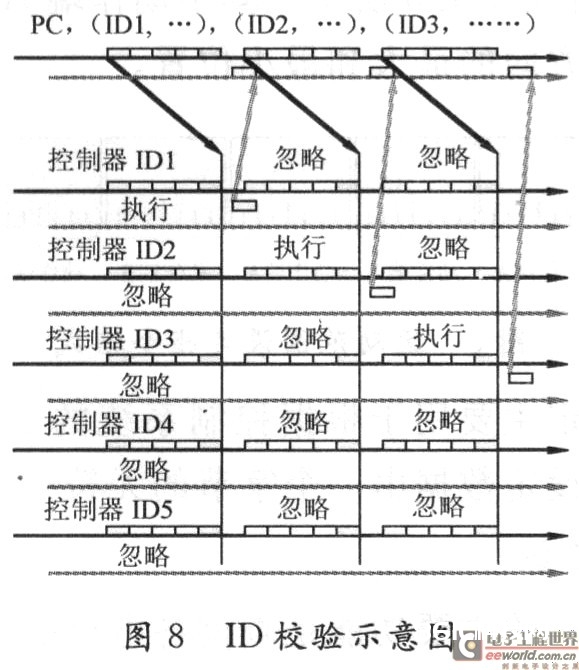
当主控微机对操控器进行操控时,一切的操控器均接纳指令。每个操控器对接纳的指令首要要进行ID校验,假如接纳的数据ID与本身的ID号共同,则履行该指令,不然疏忽该指令,如图8所示。
3.2 通讯时刻
主控微机和操控器之间的通讯速率为38 400 b/s。在每一个操控周期,规划了两次接纳和送信程序,即操控器在一个操控周期最多可一起接纳和送出两个字节的数据。需求留意的是,主控微机和操控器之间选用的是10位为一帧的异步串行通讯方法,因而每个字节的通讯时刻还应包含帧的开始位和中止位的传输时刻。若传输两个字节的数据,则通讯时刻为[2×(8+2)×1 000]/38 400=0.521 ms,依此类推,即可核算出各指令的通讯时刻。首要指令及其通讯时刻如表1所示。

3.3 通讯过错处理机制
因为外界搅扰或电压动摇等原因,主控微机和操控器之间的通讯可能会呈现过错,导致数据丢掉,受信侧不能正常接纳数据或体系运转过错。为了保证通讯的接连性和可靠性,规划了通讯过错处理机制。
因为各指令的通讯时刻均在2 ms之内,假如受信侧在2 ms之内仍然没有接纳到完好的数据,则以为通讯呈现过错,体系将进行康复处理。受信侧会把已接纳的数据清零并等候从头接纳,送信侧将再次发送数据。如此循环,假如发送三次之后仍然不能康复正常通讯,体系将中止运转。
3.4 通讯协议软件
通讯协议软件在Windows XP操作体系上用汇编语言开发而成,其编制计划扼要介绍如下:
(1)主控微机发送数据
当主控微机发送数据时,需求自动记载指令的指令字节,即需求记载接纳该指令的操控器ID号以及指令号Code。
(2)操控器接纳数据
操控器接纳数据时,首要将会进行ID校验,假如共同则接纳,然后依据指令号Code决议需求接纳的数据字节数。假如指令ID号与本身的ID号不共同或许在2 ms内没有接纳到完好的数据,操控器将会把已接纳的数据清零并等候主控微机从头发送。
(3)操控器发送数据
当操控器接纳到问询指令,并承认ID共同后,将回来该指令的指令字节(ID+Code)和相应的问询数据。关于操控指令和设定指令,则只回来一个指令字节(ID+Code)。
(4)主控微机接纳数据
主控微机接纳到操控器回来的数据后,关于操控和设定指令,将会把回来的数据与发送记载相比较,假如共同则删去发送记载,不然,以为通讯有误,进行犯错处理;关于问询指令,将把接纳到的数据显现或贮存以备后用。
4 实 验
图9是开发出来的操控器和驱动器。依据软件规划计划编制和调试程序后进行了方位操控、速度操控、电流操控的实机试验。
方位操控试验成果如图10所示。方位操控的单位是编码器的脉冲数(Pulse)。图10指出当方针方位是2 795时,方位操控可以精确地操控电机抵达指定的方位。经过屡次重复试验,其差错均小于±0.2脉冲。

速度操控试验成果如图11所示。速度操控以脉冲数/周期(Pulse/0.4 ms)为单位。
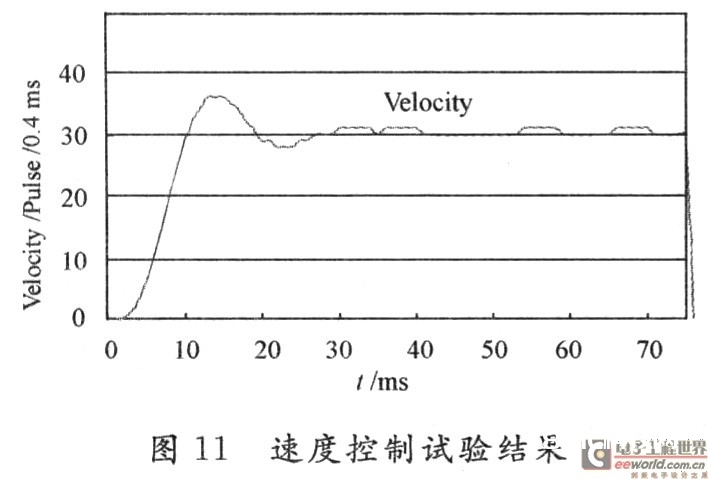
图11指出当方针速度是30 Pulse/O.4 ms时,速度操控可以精确地操控电机以指定的速度运转。经过屡次重复试验,其差错均小于±2 Pulse/O.4 ms。
电流操控试验成果如图12所示。电流操控以电机的额定电流与最大指令比(A/7 FH)为单位。图12指出当方针电流是2 A时,电流操控可以精确地操控电机在指定的电流下运转。经过屡次重复试验,其差错均小于±O.1 A。

试验标明本文提出的操控器方位精度、速度精度、电流精度能满意多轴服务机器人的需求。
5 结 语
提出的操控器为嵌入式服务机器人操控器的研讨和开发供给了一种新的操控和通讯方法。试验成果指出该操控器的操控精度能满意多轴服务机器人的需求。该项意图研讨将有助于推进我国服务机器人操控器的开展,具有较好的使用远景。