摘要
在智能家居中,扫地机器人将是必不可少的成员,而扫地机器人则要求更智能化;高功率是要求的一方面,最好能到达主动导航。现在,有多种扫地机器人在市道出售,在功率和作用方面有所短缺。该文介绍了角速度传感器XV-3510的功用和成功使用,添加扫地机器人的方向感应,可经过软件算法,进步打扫掩盖率,完结行程记载与扫地规划,以及快速回到扫地机器人充电站。
陀螺仪检测原理
角速度传感器也称为陀螺仪,是用高速回转体的动量矩灵敏壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测设备,此为机械陀螺仪。EPSON选用双T型晶体做为检测角速度的资料,归于电子式的一种,如图1中所示;当芯片做必定视点旋转,内部T型晶体发生形变,压力改动后发生电压,芯片检测到电压改动后做相应输出。
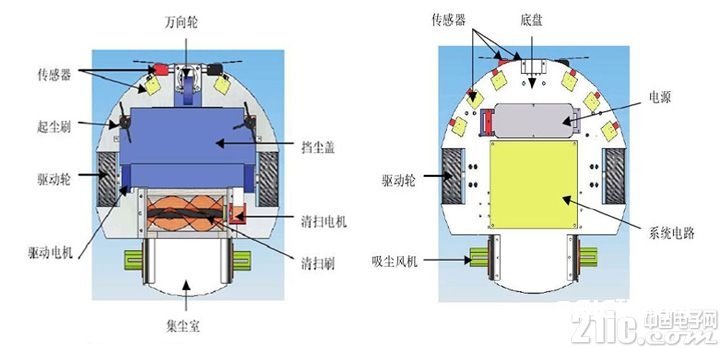
图1.扫地机器人产品图
体系组成
扫地机器人设备由主控器MCU、间隔传感器、陀螺仪、电源、吸尘器等组成,在打扫机的顶部共设有间隔传感器;扫地机器人底部前方边缘安有挨近开关,挨近开关与间隔传感器一同,构成打扫机测距体系;使用间隔传感器判别某次单向打扫途中是否有障碍物。
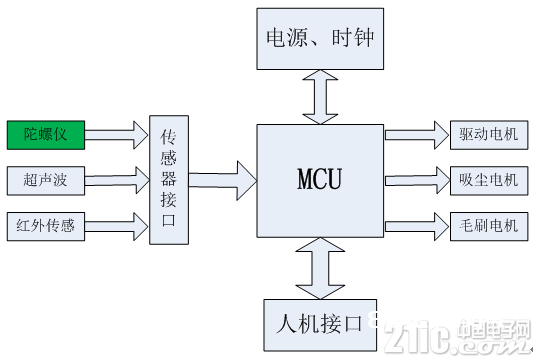
图2.体系组成框图
陀螺仪功用
XV-3510陀螺仪在扫地机器人的功用,主要是判别出机器人的行走方向,合作室内定位体系,行走电机的运转状况,可以精确定位出XOY坐标。在绕过障碍物行走时,记载绕行方向,防止机器人重复行走,革除重复打扫,进步打扫功率。经过软件核算出机器人行走路线,可做行程记载,经过打扫途径掩盖算法,完结扫地规划而且保存起来;运动过程中,可检测机器人水平滚动与水平方位,调整机身运转状况。在扫地机器人需求充电的时分,可以经过本身XOY坐标,快速回到充电站;充电完结后,还可以经过行程记载,回到扫地处继续进行打扫,功率大为进步。关于凹型或许死角地势,在打扫过程中做行程记载,可顺畅打扫。
坐标核算方法
扫地机器人所用传感器,包含陀螺仪、红外传感器、碰撞检测模块、起浮开关模块、沿边行走检测模块,各功用传感器模块合作作业,能进步产品归纳功能。经过陀螺仪方向和电机行走路线,可以核算出移动变量,核算模型如图3所示:
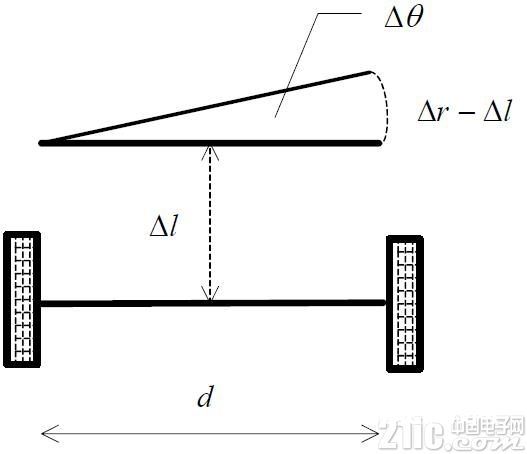
在当时时刻内,左轮轮子行走的间隔为Δr,右轮行走的间隔为Δl,两轮的轴间隔为d ,则机器人当时时刻内行走的间隔Δs = (Δr + Δl)/2,转过的视点(设定初始视点为0°)为Δθ = (Δr − Δl)/d,则当时坐标核算为Δx = Δs * cos(Δθ),Δy = Δs * sin(Δθ)。
世强商场司理张永龙主张,在传感器的选用上,需求留意以下方面:
(1)精度高,重复性好。机器人传感器的精度直接影响机器人的作业质量。用于检测和操控机器人运动的传感器是操控机器人定位精度的根底。机器人能否精确无误地正常作业,很大程度上取决于传感器的丈量精度。
(2)安稳性好、可靠性高。机器人传感器的安稳性和可靠性是确保机器人可以长时刻安稳可靠地作业的必要条件。
(3)抗搅扰能力强。机器人的作业环境是不定和不知道的,在运转中或许会有来自外在的搅扰存在。
XV-3510产品特色
世强署理的EPSON陀螺仪XV-3510,检测规模±300 deg/s,模拟输出参阅电压1430mV,份额因子为3.0 mV/(°/s),非线性参数为±0.5 % FS,产品特性如下:
. 超小封装尺度的SMD(5×3.2×1.3mm)
. 经过选用真空密封完结优异的耐环境特性
. 使用振荡晶体的高度安稳性
. 睡觉形式下的编排发动时刻和低功率耗费
. 使用于DVC与DSC图画安稳性检测,人机接口的运动检测