在GPIO操控篇中的延时业绩LED只用了简略的for循环,为了准确的计时本篇介绍运用SysTick守时器每1ms发生中止,然后完成准确守时的意图。要运用体系节拍守时器首要进行两个部分的装备。1:体系时钟操控。2体系节拍守时器的操控。
一,体系时钟操控
LPC1788有3个独立的振荡器。他们是主振荡器,内部RC振荡器,RTC振荡器。复位后,LPC1788将用内部的RC振荡器运转,直到被软件切换。这样就能在没有任何外部晶振的情况下运转。LPC1788的时钟操控如图1所示
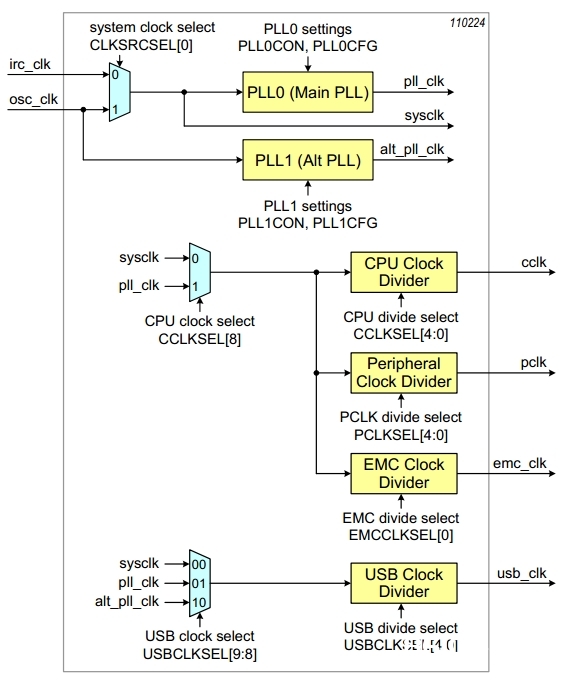
在开发板上运用12M的晶振奋为主振荡器,它经过锁相环PLL0来进步频率供给CPU。咱们芯片总是从内部的RC振荡器开端作业,因而主振荡器只会应软件的恳求而发动。完成办法是设定SCS寄存器中的OSCEN位使能。主振荡器供给一个状况标志SCS寄存器的OSCSTAT位,这样软件就能够确认何时主振荡器在运转安稳。此刻,软件能够操控切换到主振荡器,使其作为时钟源。在发动曾经,有必要经过SCS的OSCRANGE位,挑选一个频率规模。在确认了主振荡器之后,需求进行锁相环的装备。1,装备CLKSRCSEL挑选正确的时钟源。2,将正确的PLL设置值写入PLLCFG寄存器而且在PLLCON中使能PLL。3,向PLLFEED寄存器中写入馈送序列0xAA,0x55。4,设置所需的时钟分配器如CCLKSEL,PCLSEL,EMCCLKSEL,以及USBCLKSEL寄存器。5,查询PLLSTAT寄存器等候PLL确定。
二,体系节拍守时器的操控
LPC1788的体系节拍守时器是一个24位的守时器,当数值到达0时发生中止。体系节拍守时器的时钟信号能够由CPU时钟供给(即图1中的cclk)。想要在规则的时刻距离循环的发生中止,有必要将指定的正确时刻距离值装入STRELOAD寄存器进行初始化。假设咱们挑选cclk作为体系节拍的时钟信号,而且依据开发板将体系时钟设置成12MHZ,为了循环1ms发生一次中止,咱们写入STRELOAD的值为cclk/1000 – 1 。
程序的代码如下,使LED灯每500ms业绩。SystemInit函数在发动文件中被调用。
- #definerFIO1DIR(*(volatileunsigned*)0x20098020)
- #definerFIO1MASK(*(volatileunsigned*)0x20098030)
- #definerFIO1PIN(*(volatileunsigned*)0x20098034)
- #definerFIO1SET(*(volatileunsigned*)0x20098038)
- #definerFIO1CLR(*(volatileunsigned*)0x2009803c)
- #definerCLKSRCSEL(*(unsigned*)(0x400FC10C))//时钟源挑选寄存器
- #definerPLL0CON(*(unsigned*)(0x400FC080))//PLL0操控寄存器
- #definerPLL0CFG(*(unsigned*)(0x400FC084))//PLL0装备寄存器
- #definerPLL0STAT(*(unsigned*)(0x400FC088))//PLL0状况寄存器
- #definerPLL0FEED(*(unsigned*)(0x400FC08C))//PLL0馈送寄存器
- #definerPLL1CON(*(unsigned*)(0x400FC0A0))
- #definerPLL1CFG(*(unsigned*)(0x400FC0A4))
- #definerPLL1STAT(*(unsigned*)(0x400FC0A8))
- #definerPLL1FEED(*(unsigned*)(0x400FC0AC))
- #definerCCLKSEL(*(unsigned*)(0x400FC104))//CPU时钟挑选寄存器
- #definerUSBCLKSEL(*(unsigned*)(0x400FC108))//USB时钟挑选寄存器
- #definerPCLKSEL(*(unsigned*)(0x400FC1A8))//外设时钟寄存器
- #definerPCON(*(unsigned*)(0x400FC0C0))
- #definerPXCONP(*(unsigned*)(0x400FC0C4))
- #definerSCS(*(unsigned*)(0x400FC1A0))//体系操控和状况寄存器
- #definerCLKOUTCFG(*(unsigned*)(0x400FC1C8))
- #definerSTCTRL(*(unsigned*)(0xE000E010))
- #definerSTRELOAD(*(unsigned*)(0xE000E014))
- #definerSTCURR(*(unsigned*)(0xE000E018))
- #definerSTALIB(*(unsigned*)(0xE000E01C))
- #defineCCLK120000000
- volatileunsignedlongSysTickCnt;
- /*
- 体系时钟初始化
- */
- voidSystemInit()
- {
- rSCS&=~(0x1<<4);//频率12M
- rSCS|=(0x1<<5);//使能主振荡器
- while(0==(rSCS&(0x1<<6)));//等候主振荡器安稳
- rCLKSRCSEL=0x1;
- rPLL0CFG=0x9;//装备CCLK=120M
- rPLL0CON=0x01;
- rPLL0FEED=0xAA;
- rPLL0FEED=0x55;
- while(0==(rPLL0STAT&(0x1<<10)));
- rCCLKSEL=(0x1|(0x1<<8));
- rPCLKSEL=0x2;//装备PCLK=60M
- rCLKOUTCFG=0x0|(0xb<<4)|(0x1<<8);
- }
- /*
- 体系节拍守时器初始化
- */
- unsignedcharSysTick_Config(unsignedintticks)
- {
- if(ticks>0xFFFFFFUL)
- return0;
- rSTRELOAD=ticks;
- rSTCURR=0x0;
- rSTCTRL=(0x1)|(0x1<<1)|(0x1<<2);
- return1;
- }
- /*
- 体系节拍守时器中止处理函数
- */
- voidSysTick_Handler(void)
- {
- SysTickCnt++;
- }
- intmain()
- {
- unsignedcharvalue=1;
- SysTick_Config(CCLK/1000-1);//每1ms发生一次SysTick体系反常
- rFIO1DIR|=(1<<18);//GPIO1.18->OUTPUT
- while(1)
- {
- if(SysTickCnt>=500)
- {
- SysTickCnt=0;
- value=!value;
- }
- if(0==value)
- {
- rFIO1PIN&=~(1<<18);
- }
- elseif(1==value)
- {
- rFIO1PIN|=(1<<18);
- }
- }
- }
关于SysTick的反常的优先级能够在SHPR3中进行设置,优先级等级能够从0~31。初始化默以为0,只低于固定的负数优先级的复位,硬件毛病和NMI。