永磁无刷直流电动机具有沟通电动机结构简略、运转牢靠、维护便利,且具有直流电动机杰出的调速功用而无机械换向器等长处在国民经济各个领域中得到广泛使用。故多直流无刷电动机和谐操控的分布式体系具有宽广的远景。
但由于无刷直流电动机操控体系存在不同程度的非线性、时变性、换向效应等不确认性,影响了伺服体系的功用。因而,一般PI操控器难以获得满足的操控作用,然后约束了无刷直流电动机的运用。
本文提出一种电流环选用经典PI而速度环选用含糊自适应PID操控办法,并规划了以PICl8F458为中央处理器的依据CAN总线技能的无刷直流电动机含糊自适应操控器。试验结果表明,此体系经过会集办理与涣散操控很好地完成了多台直流无刷电动机间快速和谐操控,一起也经过含糊操控战略减小盯梢差错,提高了体系的鲁棒性。
1 电动机运转形式挑选
无刷直流电动机的电枢绕组分Y绕组和△绕组两类,换相办法一般也有桥式和半桥式之分。常见的
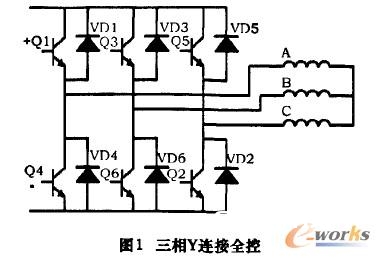
主驱动类型有:三相半控、三相Y衔接全控、三相△衔接全控。其间三相半控电路的特色是简略,但电动机本体的利用率很低,并且在运转过程中转矩动摇较大;而三相△形衔接全控电路在生产实践中使用又较少。故一般选用三相Y衔接全控形式,其又分两两导通形式和三三导通形式。
三三导通形式绕组利用率高,各相绕组在每一时刻都有电流经过,正向和反向电流各1/2时刻,转矩动摇较大,绕组利用率高于两两导通形式;但组成电磁转矩比两两导通形式小,且易呈现桥臂短路风险。
经归纳鉴定确认电动机运转于三相Y衔接全控形式的“两相导通三相六状况”,如图1。

2 操控战略与操控办法挑选
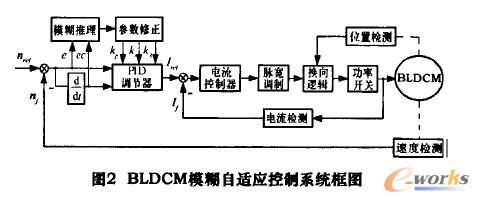
依据体系所要完成的功用,挑选恰当的操控计划。本体系所选用的含糊自适应PID操控算法的转速PWM操控器的体系结构首要由含糊操控和参数可调PID体系两部分构成。这样,当负载发生变化或有不确认性的搅扰时就可以敏捷做出有用的判别,并予以战胜。其操控体系框图如图2所示。
3 操控器硬件完成
在依据操控结构与操控办法挑选主操控芯片,并依据实践要求将操控体系划分为12个单元,分别为:PIC操控器单元;按键与显现操控单元;CAN总线通讯单元;电流检测单元;电压检测单元;报警单元;逻辑换相与维护单元;驱动电路;逆变电路;泄放单元;转子方位检测单元;BLDCM调速体系本体单元。下面就其首要单元硬件规划进行扼要描绘。
3.1 CAN总线通讯单元
与其它总线比较,CAN总线具有成本低,开发使用便利的长处,易于选用现有的开发工具进行开发。它首要被广泛使用在抗搅扰和实时通讯才能要求较高的小型网络。依据CAN总线的特色,体系选用其作为上位机与下位机的通讯办法。体系选用MCP2551芯片,其为高功用CAN总线收发器。电路如图3所示。

3.2副电源上电检测单元(图4)
此部分的作用是检测操控电路是否上电正常。假如+15 V,+12 V,-12 V悉数供电正常,PIC的RA4端口为高电平,表明主电路可以上电;不然,体系显现副电源供电不正常,主电路不上电。

3.3主电路操控单元(图5)
此部分的作用是在副电源供电正常时,P%&&&&&%的引脚RCO输出1,主电路经过继电器上电。当体系呈现毛病时,RCO输出0,关断主电路。