在伺服体系中常用具有线性特性的补偿设备(通常是补偿电路),采纳串联、顺馈(或称并联)、负反馈、正反馈,以及它们的组合方式,来改进体系的特性,进步体系的作业质量。下面别离介绍各种补偿联接方式的特色及有关注意事项。
伺服体系的常用线性补偿
1.串联补偿
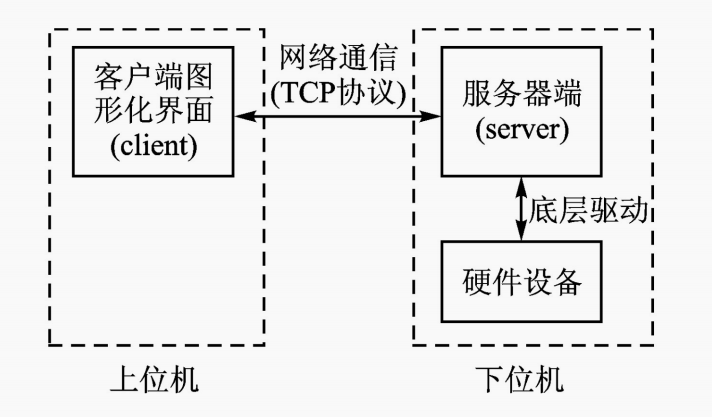
串联补偿是指在体系主通道(即前向通道)中串接人恰当的补偿设备(电路)。如图所示。

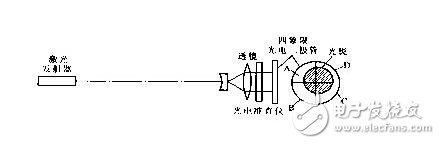
常用的串联补偿设备均由电路组成,有仅用R、L、C组成的无源补偿网络。有运用线性集成放大器组成的有源补偿网络,它们所能传递的都是直流信号,因而只要串联在体系线路中传递直流信号的部位,才干起到相应的效果。假如体系中传递的是固定频率的沟通载频信号,则无法运用以上两类补偿网络。
常用的补偿网络,在工程上有用的还有许多方式。作为体系的串联补偿,它们中的一些是不能用的,由于在体系的主通道中,不能串联含有纯微分环节的电路(即不串联含有s=0的零点的网络),它将阻断稳定信号的有用传递,使伺服体系不能有用地作业。
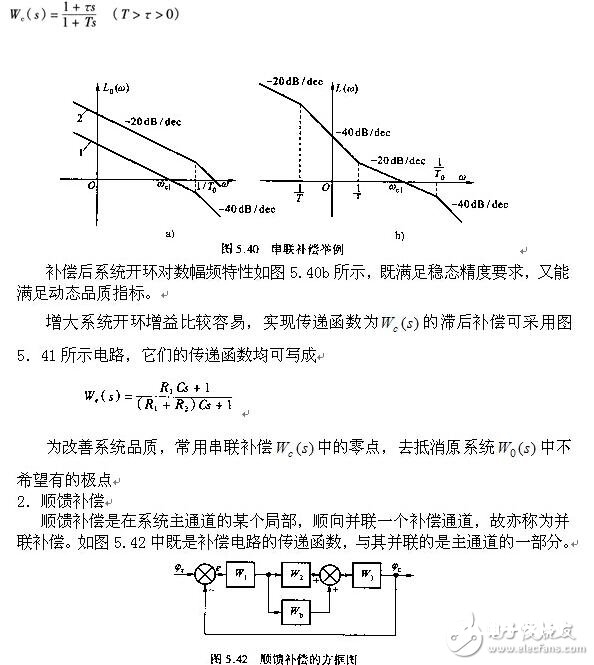
为了进步体系的稳态精度,常采纳进步体系的型(即无差度)的方法,这就要求在体系的前向主通道中串入积分环节,或许串联PI调节器。
假使体系开环对数幅频特性(体系是最小相位体系)如图5.40a中曲线1所示。在零初始条件下,体系对输入阶跃信号的响应能满意动态质量要求,但体系的稳态精度不高;为进步体系稳态精度需增大体系开环增益,体系开环对数幅频特性如图a中曲线2所示,但此刻体系的动态质量不满意要求。在增大体系开环增益的一起,串接一个滞后补偿
伺服体系的测速与测角(位移)
影响伺服体系操控要素许多,其间最重要的是方位、速度、加速度以及振荡等伺服。体系的操控精度是最重要的技术指标之一,伺服体系的操控精度,受多方面要素的影响,其间非常要害的是检测设备的精度(分辩率)。现代科学技术的开展,对高精度伺服体系的运用越来越多。例如高精度锁相调速体系,要求测速差错《i0~,而一般测速发电机测速差错却在2%。0.02%规模。用于盯梢卫星的雷达天线伺服体系,它的盯梢差错有必要《1’。
观测天体的射电望远镜,要求伺服体系的差错《0.05’。开端进入家庭的电视激光放像机,激光针头的径向运动要伺服体系来操控,该体系的方位差错≤1胛。以上几例均阐明伺服体系的精度是较高的,而它们所选用的检测设备的精度将更高。首要,体系中的检测设备对差错能分辩,并提供有用的信号,然后才谈得上对体系进行操控。因而,检测设备的高精度,是完成高精度伺服体系的条件。但是,各种用处的伺服体系是多种多样的,它们对精度的要求也很不共同,正由于如此,在伺服体系中选用的检测设备其类型非常冗杂,本节只就常见的模拟式测速和测角(位移)设备,做一扼要阐明。
1.角速度的检测
在速度伺服体系中,体系的输出端有必要有检测角速度的设备,在方位伺服体系中,也常需求它取得速度阻尼信号。因而在伺服体系中被广泛选用。用得最多的是各种测速发电机,比较简易的有测速电桥,比较准确的是增量码盘。
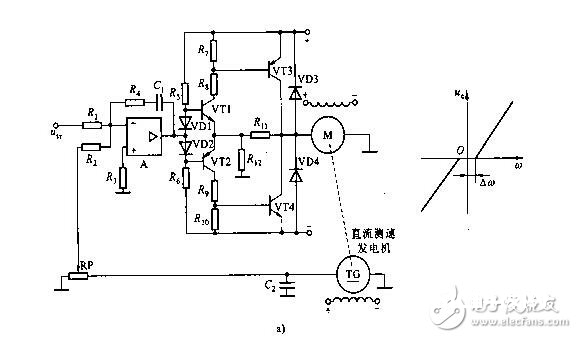
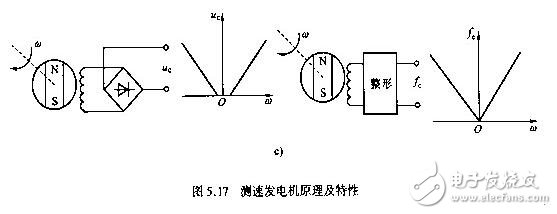
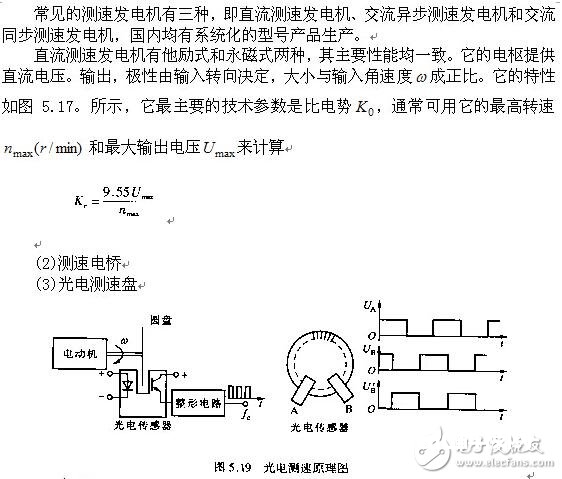
(1)测速发电机