摘要:针对一种杂乱的、较难树立精确模型的空间桁架,研讨了其建模、自动杆方位优化及振荡操控的问题。文中首要树立了空间桁架的机理模型。然后规划了压电自动杆,选取一种不依赖于操控律的依据能量的优化原则,并依据所树立的模型对其在空间桁架中的设备方位进行了优化。最终关于空间桁架这种并联结构,规划了一种不依赖于被控目标精确模型的自抗扰操控器。仿真算例标明本文所规划办法的有用性。
1 导言
跟着对太空探究的不断深化以及我国空间光学技能的迅速发展,人们关于太空中航天器的作业精度和安稳运转等方面的研讨也越来越深化,特别是航天器中的挠性桁架结构。当有外界扰动作用在桁架上时,因为桁架结构本身所具有的结构特性和太空中低阻尼环境等要素的原因,桁架结构易发生非期望的振荡,然后影响航天器的正常作业。因而关于航天器内桁架结构的振荡操控方面进行研讨具有严重现实意义。
现在,在桁架结构的操控问题中,大多是将自动构件内嵌于桁架结构中,然后构成智能结构,并以自动构件为中心原件,对智能结构进行操控。在自动构件的挑选中,因为压电资料所具有的质量轻、呼应快、低功耗等特色,因而被广泛运用于空间桁架的振荡操控之中。本文以压电资料为根底,规划了压电自动杆。针对压电自动构件的方位优化问题,现在已有依据能控/能观性的优化原则、依据体系能量的优化原则等、考虑到太空中能量较为宝贵,本文挑选了一种以最小驱动电压发生最大驱动力的优化原则。
现在关于桁架结构的自动振荡操控已有多种办法,如正方位反应操控、模态操控法、最优操控、含糊操控等办法。但因为桁架结构具有较大的杂乱性,取得其精确的数学模型是较为困难的。因而本文挑选了一种不依赖于被控目标精确模型的自抗扰操控器,经过对本文中所树立的桁架模型进行仿真试验,验证了自抗扰操控器的有用性。
2 空间桁架结构建模
所需操控的空间桁架节点编号如图1所示:
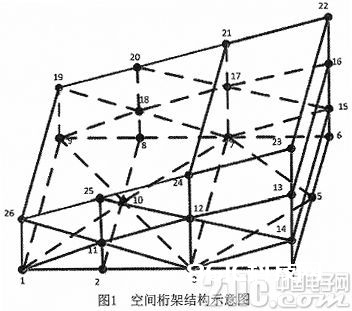
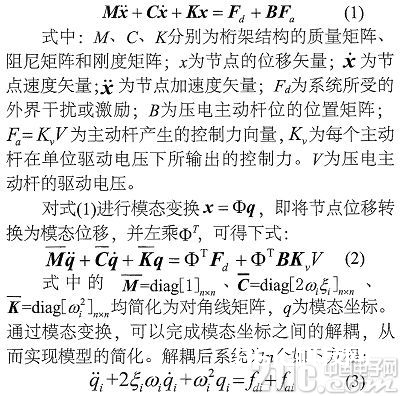
所规划的结构主要由梁单元组成,共有63根柔性梁,26个节点,其间底面的2、3、7、8节点为固定在地上的束缚节点,激振力施加于底面的10号节点竖直方向。依据有限元的办法,可以取得该结构的动力学方程为:
经过求解式(3)所得出的,代回模态改换然后得出各节点位移。
3 压电自动杆规划及方位优化
因为压电资料具有正、逆压电效应,是以其既可作为作动器,也可作为传感器,而且具有质量轻、呼应快、低功耗和易装置等特色,因而其广泛的运用于桁架结构的振荡操控中。
3.1 压电自动杆的规划
因为压电片的压电应变系数d33一般很小,因而单个压电片所能输出的位移十分小。而关于在实践工程运用中的自动操控构件来说,即需求具有可以满意需求的输出位移量,一同也要求其能承当住必定的压力。而假如只经过一片压电片,在输入电压遭到限制的状况下,一般无法到达实践的需求。因而经过规划多个压电片以力学上串联、电学上并联的办法堆叠在一同构成压电堆,则可以战胜较低电压驱动下单个压电片位移过小的缺陷,经过多个压电片变形量的线性叠加,则可以运用较低的电压,取得较大的输出位移,然后增加了输出的位移量,满意了实践的需求。
压电堆的输出位移为:
![]()
其间,δi为单个压电片的输出位移,n为压电片的个数,l为厚度,![]() 是稳定电场下的弹性和婉系数,d33为压电应变系数,Ks称为压电堆的等效刚度,ds称为压电堆等效压电应变常数,F为轴向所受的力,V为轴向所施加的电压,A为截面积。
是稳定电场下的弹性和婉系数,d33为压电应变系数,Ks称为压电堆的等效刚度,ds称为压电堆等效压电应变常数,F为轴向所受的力,V为轴向所施加的电压,A为截面积。
选用180片压电片叠加构成压电堆,然后依据压电堆,规划了压电自动杆,其结构图如图2所示。
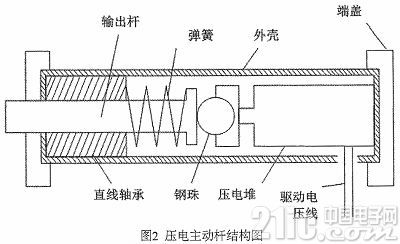
压电自动杆的输出位移和输出力是进行压电自动杆规划时所需考虑的要点内容。本文所规划的压电自动杆主要由压电堆、直线轴承、钢珠和外部包装的钢壳等几部件构成。
压电堆内部放置了碟片绷簧进行预压,使压电堆一直作业在受压状况并确保其内部压电片之间严密相连。可是为了确保压自动杆内部各部件之间不存在空隙,还需求在自动杆内部规划一个绷簧,以确保自动杆内部各零件之间严密触摸。一同,在压电堆的一侧运用钢珠作为传力设备以确保压电堆只会遭到外部轴向载荷的作用,然后防止其或许呈现接受曲折载荷的状况。一同,为了减小输出杆在运动时所发生的冲突,运用直线轴承内套输出杆,以确保输出杆接近钢珠端不会与自动杆外壳触摸,而且在直线轴承内要确保满足的润滑,以最大极限的减小轴向冲突力。
3.2 自动杆的优化原则
因为在太空中,动力是比较宝贵的资源。所以关于刚架的操控期望是自动杆的振荡操控能尽或许的节约电能。因而,总是期望自动杆的设备方位可以确保其在运用尽或许小的驱动电压的状况下输出最大的操控力。
在式(2)中,令:
A=φTBKv (5)
由上式可以看出,矩阵4是由模态矩阵φT、自动杆的设备方位矩阵B和自动杆的功能矩阵Kv所组成。因而,矩阵A不只与体系本身的模态相关,而且很大程度上会遭到自动杆的设备方位和其致动特性的影响,所以称A为自动杆方位装备矩阵。令:
由上式可以看出,若λ的值越大,则标明模态操控力和操控电压的比值也就越大,即表明运用的操控电压较小时,可以发生的模态操控力较大,此刻体系的作动功率较高。所以当确保ATA的一切特征值都很大而且散布较为会集时,可以取得较大的作动功率。如此则可以得出作动器的优化原则为:
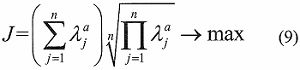
在上述的优化原则中,前半部分是ATA一切特征值的算术平均值,后半部分是一切特征值的几许平均值,求这两项乘积的最大值就能得出一个特征值较大且散布会集的A。
3.3 遗传算法优化成果
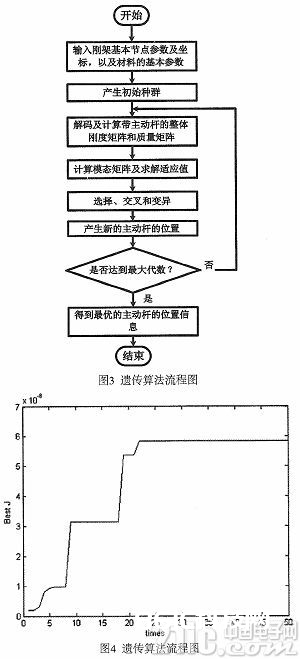
运用遗传算法对前面所得优化原则进行自动杆的方位优化,选取腓为遗传算法的习惯度函数。挑选运用三个自动杆。优化流程图如图3所示。
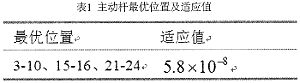
依据流程所示的进程,得出了在刚架中装备3个自动杆时的最优设备方位如表1所示。图4为遗传算法优化进程中最优习惯值的迭代进程图。
4 自抗扰操控器
因为空间桁架结构模型较为杂乱,很难取得其精确的数学模型。而自抗扰操控器不依赖于被控目标的精确模型,而且关于扰动可以进行很好的按捺,具有较强的鲁棒性,因而十分适用于对空间桁架结构的操控之中。
图5为自抗扰操控器的结构框图,其主要由扩张状况观测器(ESO)和非线性差错反应操控率(NLSEF)组成。

4.1 扩张状况观测器
扩张状况观测器的中心思维是将体系的外部扰动和内部建模不确认性等不知道扰动一同视作“总扰动”,将此“总扰动”扩张成为一个新的状况变量,然后构建一个可以观测此扰动变量的扩张状况观测器。
关于二阶的非线性体系
式中f(x1,x2,ω)为体系外绕和内部不知道要素的总合。将原二阶体系中的f(x1,x2,ω)扩张成一个新的状况变量x3,并记 ![]() ,即可得到体系新的状况方程:
,即可得到体系新的状况方程:
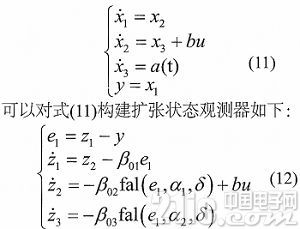
式中,β01、β02和β03等均为观测器的参数,经过调理这三个参数,可以使得z1(t)→x1(t)、z2(t)→x2(t)和z3(t)→x3(t)。fal函数是为了防止在数值仿真时呈现的高频颤振而规划的幂次函数,此函数在原点周围具有线性的特性,界说如下:

其间δ为线性区间的长度。
4.2 非线性差错反应律
为了消除振荡,体系输入的参阅位移和速度均为0。依据扩张状况观测器输出的状况变量的估量值可以得到体系的位移差错e1和速度差错e2。然后规划的非线性差错为:
u0=β1fal(e1,a1,δ)+β2fal(e2,a2,δ) (14)
4. 3 扰动补偿
将ESO估量的总扰动z3(t)在操控律中予以补偿可得:
![]()
将式(15)的操控量输入到式(10)的二阶非线性体系后,可以得到补偿后的体系为:
在补偿后的操控体系中,现已没有不知道的扰动项,而且将操控体系转化为了简略的积分器串联型的方式。
4.4 并联体系自抗扰操控
将前面所树立的解耦后的刚架动力学方程分解为下式,这种结构称为并联体系结构。

关于不可以精确确认的刚架结构各阶固有频率、阻尼比或其他一些不确认要素,可将这些不确认的部分以为是内部不知道要素,然后可以将以上体系改换为:

式中的ω0和ξ0均为自己规划的已知参数。
对式(18)进行改换,可得以y作为状况变量的新体系模型为:
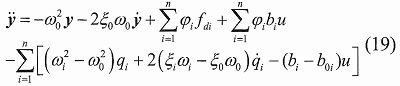
上式中前四项的参数均为已知的,是体系的已知部分、外界已知的激振力和体系的操控律,最终一项是体系不知道的部分。
5 自抗扰操控的仿真曲线
运用压电自动杆对空间桁架进行振荡操控,共运用了三个压电自动杆,1号自动杆设备方位为底面的节点3—10,2号自动杆为旁边面的节点15—16以及3号自动杆为顶部节点21—24。设备好压电自动杆今后的空间桁架结构前10阶固有频率如表2所示。
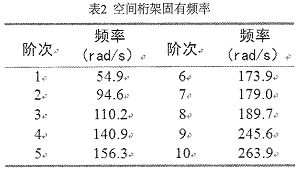
选取底面10号节点的方向为激振点,选取的正弦激振力幅值为10,激振频率与桁架结构的一阶固有频率相同,为54.9rad/s,这样可以激起桁架结构模型的一阶振荡模态,然后激起较大的振荡位移。并联体系中的参数ω0=60,ξ0=0。
操控节点为三个自动杆设备方位地点的节点,分别为10号节点的x方向,16号节点的z方向和21号节点的y方向,别的选取19号节点的y方向作为观测节点。
从图6中可以看出,施加操控今后,在增加了自动杆的三个衔接节点可以取得很好的减振作用,体系在遭到外力时激起的振荡得到了有用的按捺,而且有用的按捺了19号节点在发生振荡时的位移呼应。四个节点的振荡位移均减少了近两个数量级。

图7和图8分别为扩张状况观测器输出的盯梢位移和速度益线,从图中可以看出,扩张状况观测器观测取得的三个操控节点的位移和速度曲线根本与原体系的速度和位移曲线共同,说明晰扩张状况观测器很好的盯梢了原体系的状况。

图9为扩张状况观测器观测得到的三个操控器的扰动盯梢曲线。因为在实践操控中,扰动是不可被精确得知的,但因为扩张状况观测器对体系输出的位移和速度的盯梢作用很好,所以可以以为所规划的扩张状况观测器也可以精确的盯梢上总扰动。
所施加的正弦扰动幅值为30,频率分别为50rad/s、200rad/s、600rad/s,在不同扰动频率下观测取得的四个节点操控曲线如图10和图11所示。

从图10和图11中可以看出,在操控输入端增加了三种不同频率的扰动今后,操控器的操控作用仍然很好。其间当输入频率为200rad/s和 600rad/s时,操控器的输出根本和不增加扰动时的相同,仅在当扰动频率为50rad/s时,操控作用会相关于没有扰动时的操控作用略有变差,但仍然具有很好的振荡按捺作用。施加扰动频率为50rad/s时操控作用略有变差的原因是因为此刻扰动信号的频率与激振力的频率附近,所以会对体系有必定的影响。因而,可以看出自抗扰操控器具有较好的鲁棒性。
图12中对比了未加扰动时和施加了频率为50rad/s扰动时三个自动杆的操控电压的不同。因为自动杆最大所能接受的电压为1 50V,假如自动杆输入的电压超越150V,则有或许对其形成很大的危害,所以关于自动杆的输入电压需求进行限幅。从上图中可以看出,操控21号节点的自动杆在0.5s到0.8s和1.75s到2s左右时,现已到达了最大的输入电压,所以位移呼应的操控作用也会有所下降。而这也与图9和图1 0中所示的位移呼应在0.5s到0.8s和1.75s到2s左右时的位移操控作用相对最差所相对应。在这2个时刻段内,扰动会对体系形成较大的影响,但在这段时刻往后,体系仍然可以取得较好的振荡操控作用。
6 定论
本文关于所树立的空间桁架模型,选取了压电自动杆作为其操控元件,树立了桁架结构的动力学方程。然后规划了压电自动杆,并运用依据能量的优化原则和遗传算法进行了自动杆的方位优化。在此根底上,运用了由扩张状况观测器和非线性差错反应操控律组成的自抗扰操控器对树立的模型进行了仿真剖析。经过扩张状况观测器对体系状况的精确观测,然后完成体系中不知道扰动的补偿。仿真成果标明,本文所规划的自抗扰操控器可以有用、精确的对空间桁架结构的振荡进行操控。最终在操控体系中参加正弦扰动,验证了自抗扰操控器有较好的鲁棒性。