


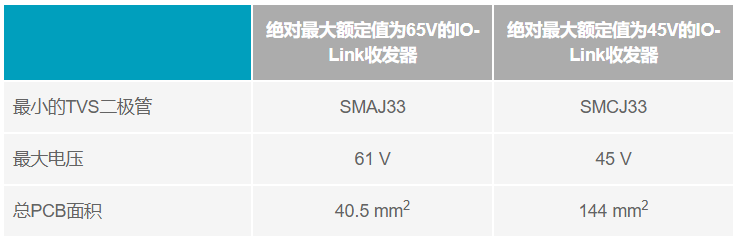
IO-Link是一种标准化技术(IEC 61131-9),规定工业系统中的传感器和执行器如何与控制器交互。IO-Link是一种点对点通信链接,采用标准连接器、电缆和协议。IO-Li...

2023 年 12 月 6 日,中国北京讯 - 全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布,推出适用于无刷直流(BLDC)电机应用的首创的无传感器电机驱动器IC系...

功率放大器模块是一种电子器件,用于将输入信号增强到足够的功率水平,以驱动负载或输出到外部电路。它通常由一个晶体管、一个电容器和一些电阻器组成。 功率放大器的增益可以调节,以便根据需...

第100届中国电子展——国际元器件暨信息技术应用展 时间:2022年11月24-26日 地点:绍兴国际会展中心 主题:创新强基 应用强链 中国电子展(CEF),华东地区年底收关电子...
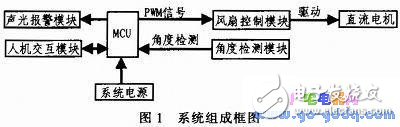
关于帆板控制系统的设计实现-采用MMA7361加速度角度传感器测量角度。加速度角度传感器是通过测量由于重力引起的加速度计算出器件相对于某一平面的倾斜角度。角度传感器反应灵敏、输出数据准确且价格适中。利用加速度传感器进行角度测量分为3种:单轴倾角测量、双轴倾角测量和三轴倾角测量。
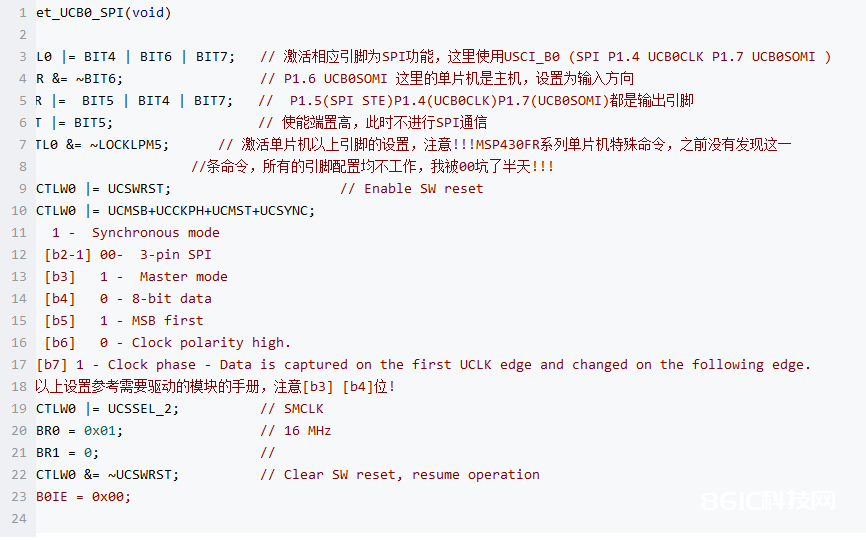
基于MSP430的SPI驱动编写之用MSP430驱动AFE4400-平常工作中,如果使用 MSP430 作为主控芯片,经常会遇到需要编写SPI 或 I2C 驱动,来读取和控制外设(比如LCD屏幕,一些传感器)的情况。为了减少重复性工作,本文以具体实例来总结 SPI驱动 编写的详细步骤(用MSP430FR6989来驱动集成模拟前端AFE4400)。

STM8L串口中断我们应该注意哪些地方?-在调试PM2.5传感器GP2Y1051的时候,发现在仿真的时候开始能够进行数据的接受,但是如果暂停之后就不能接受数据,其实只是接收了一次完整的数据。

基于ldc1000的单片机测试数据程序-在传感技术领域,不管是高端灵敏度、高精度的超声传感器,或者是低端、低成本的开关式传感器,这些工作LDC1000都可以胜任。
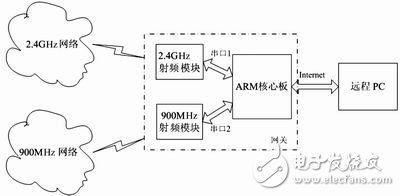
基于MCU52单片机在无线传感器网络演示系统中的应用-无线传感器网络能够实时监测、感知和采集网络分布区域内的各种环境或监测对象的信息,并对这些信息进行处理,获得详尽而准确的数据,并传送到需要这些信息的用户。
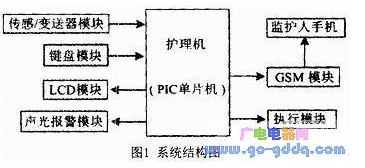
PIC单片机对清洁护理机的设计-系统硬件包括电源模块设计、PIC单片机主控板电路设计、按键设计、LCD显示设计、传感器/变送器电路设计、语音电路设计、GSM通信模块电路设计和外围驱动执行机构电路设计等。
