



一种异质多传感器的异步量测融合算法验证-本文从建立伪量测方程的角度,提出了一种异质多传感器的异步量测融合算法,该算法是通过在融合中心建立伪量测方程使各传感器的数据同步,然后利用同步的思想进行处理,最后通过计算机仿真进行了验证。

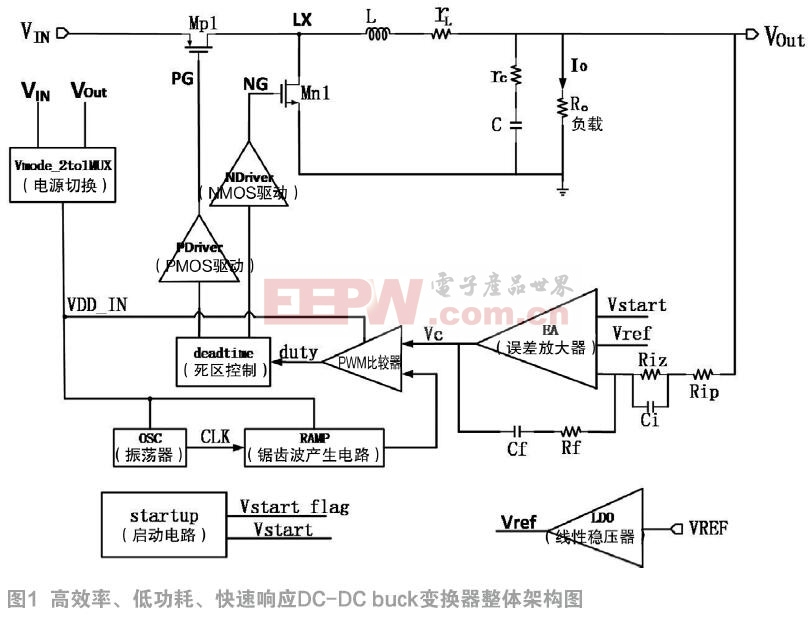
对Buck变换器主电路在CCM工作模式下进行动态小信号分析,推导状态方程得出小信号模型,并设计PID闭环控制补偿网络保证环路稳定。采用输出电压给控制环路供电的低功耗结构,以及采用加大系统环路带宽的方案
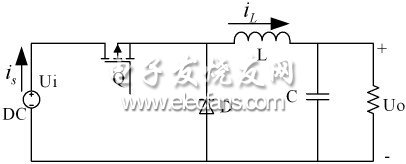
Buck变换器只有两种工作模态,即开关管导通和开关管截止状态。首先为理想的Buck变换器在一个开关周期内的两种不同工作状态建立状态方程和输出方程。这里取电感电流iL(t)和电容电压uc(t)作为状态变

MATLAB中进行软件滤波仿真我身边有些朋友说现在在学校学习什么拉氏变换,Z变换,傅立叶变换没有用,传递函数没有用,差分方程没有用,只是纸上谈兵,我这里先就传递函数和拉氏变换和差分方程介绍几点不自量力


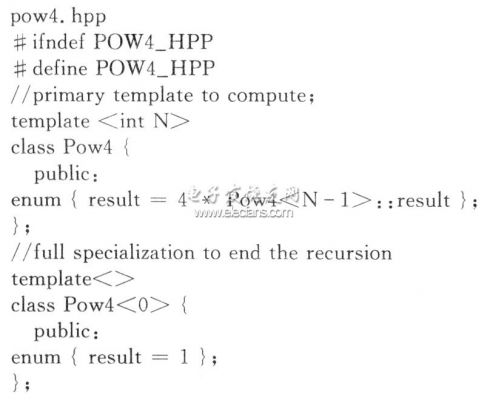
量纲误用在科学计算程序中是一种常见的错误,然而程序设计语言的标准类型系统却对此无能为力。物理方程中的量纲错误可以手工分析出来,然而求解物理方程的计算机程序中的量纲错误却难以被发现,因为
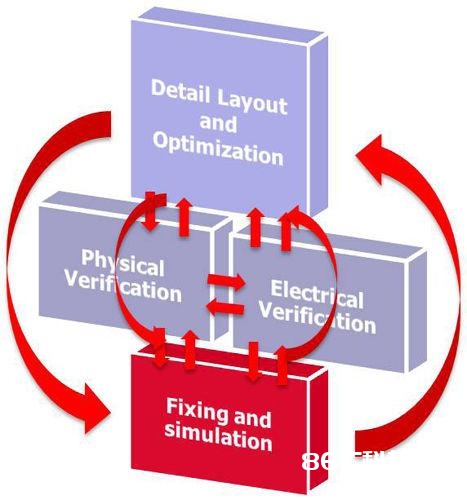
这种方法能使用签核DRC引擎来执行所有的检查,包括推荐规则检查、模式匹配规则检查、基于方程的DRC和双重成像(double patterning)规则检查,让定制化IC设计师们能在版图生成过程中纠正和
